
Improving the accuracy of satellite navigation systems
Einstein’s general theory of relativity, which deals with gravity, could be used to improve global navigation systems in the future. ESA’s Advanced Concepts Team has collaborated with the University of Ljubljana to research this possibility.
Present navigation satellite systems, such as Galileo and GPS, employ Newtonian trigonometry to determine positions, using Earth stations as reference points. This approach would perform ideally if all the satellites and the receiver were at rest and far from Earth.
However, this is only correct as a first approximation – because of the level of precision needed by a GNSS, the distortions that Earth causes in nearby space and time (space-time curvature) and the effects of the relative motions between the satellites and the user (relativistic inertial effects) both have to be considered. These are accounted for by introducing relativistic corrections to the Newtonian theory. For a ground user, these corrections can be as large as 12 km after one day.
Changing the paradigm
A simple way to avoid having to deal with the defects of Newtonian theory is to change the paradigm. Instead of modelling the system in a Newtonian framework and adding relativistic corrections, the positioning system could be modelled directly in general relativity.
Drawing inspiration from a paper published by Bartolomé Coll of Systèmes de Référence Temps-Espace at the Observatoire de Paris, a study was conducted to introduce such relativistic coordinates for the definition of a global reference frame that can be used for positioning and navigation.
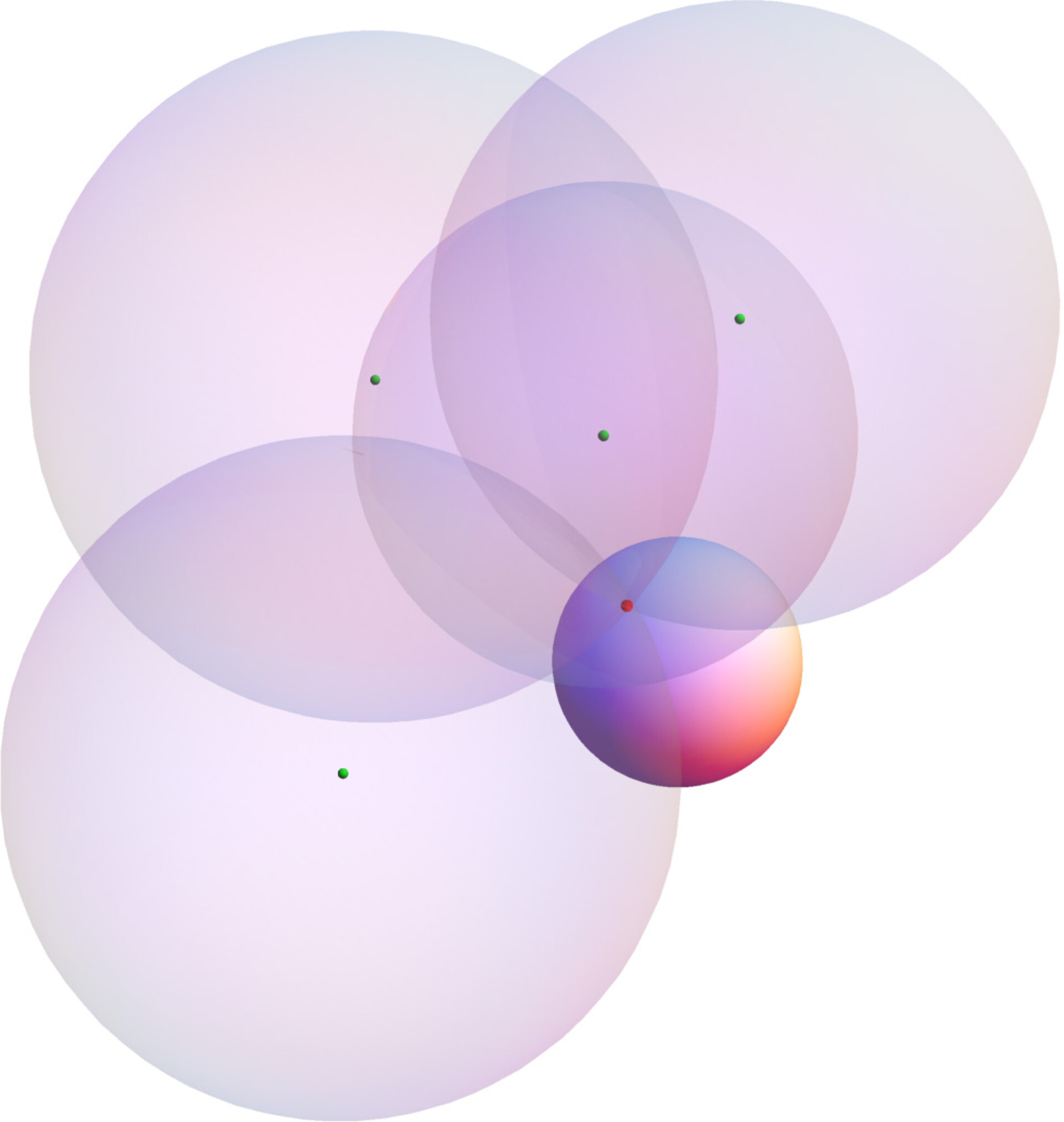
A local Schwarzschild frame was designed, based on the clock signals originating from four satellites. Algorithms to read the user’s local Schwarzschild coordinates from the four satellites signals were developed, implemented and tested.
The new reference frame is based on the dynamics of the satellites instead of relying on the location of terrestrial ground stations. If the constellation of satellites were to be equipped with inter-satellite communications, then each satellite could be a user of its own positioning system.
The first results promise an increase in the accuracy and stability by using the new reference frame. The question whether it can avoid the need for terrestrial reference frames is still under study.
Future applications
A workshop on Relativistic Positioning Systems was organised at ESTEC in April, to present the results of ESA’s studies and the work of other research groups in Europe. The new approach based on our very fundamental understanding of space-time could lead to several new applications, including:
- A highly stable and accurate reference system in space, which could be used for space science and high-precision orbitography;
- The definition of a galactic reference frame for interplanetary navigation, using pulsars as clocks.
The results complement other studies performed by ESA that show how inter-satellite communication could reduce the ground infrastructure and operating costs of a navsat system while increasing its reliability.
