ASCAT Ground Processor Prototype
The Ground Processor Prototype (GPP) allows the raw science data generated by the instrument to be converted into three sets of radar backscatter values from which the wind field can be deduced.
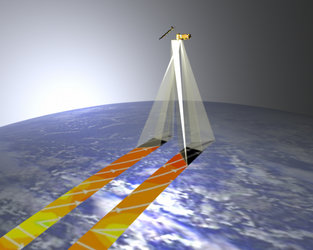
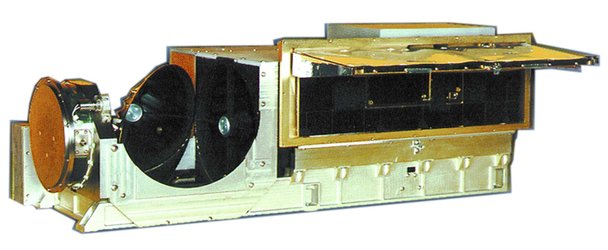
The Advanced Scatterometer (ASCAT) system architecture is shown in the figure below. Initially in the ground processor, corrections are made for receiver noise and instrument gain variations. This includes both internal calibration correction (for power gain variations) and external calibration correction for the antenna patterns. The corrected power spectra are then converted into raw (radar backscatter) sigma-naught values using normalisation look-up tables.
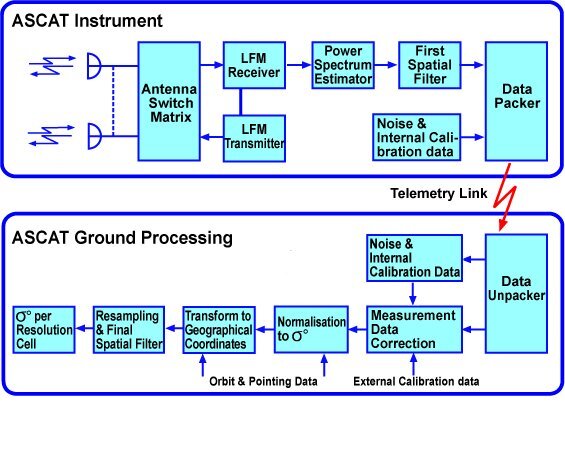
ASCAT system architecture
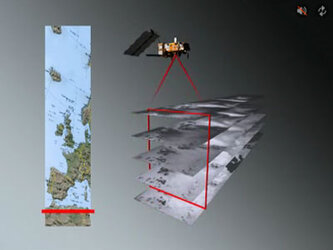
The raw sigma-naught values are transformed from the frequency-domain into geographical coordinates and spatially filtered onto the grid of nodes along each beam direction. These are aligned such that the nodes from each of the three beams illuminating a swath are coincident, thereby producing the sigma-naught triplets. This is referred to as the Level 1b product. Further processing (e.g. wind field extraction) depends on the application, and is outside the scope of the GPP.
The main emphasis in the GPP development has been on the correctness and accuracy of its algorithms, rather than data throughput. Its purpose is to allow investigation and optimisation of various processing parameters prior to development of the operational processor. The GPP comprises three parts:
- a part which processes the instrument source packets into sigma-naught triplets
- a part which supports development, verification and testing
- the software environment
The first part is the core of the GPP and consists of the:
- Level 1b Processor Prototype (L1PP)
- External Calibration Processor Prototype (ECPP)
- Normalisation Table Generator (NTG).
The second part contains the Point Target Simulator (PTS).
The third part contains the:
- data handling
- man machine interface
- analysis tools to assess relevant parameters from intermediate and level 1b data

Overview of the ASCAT GPP
The L1PP processes the instrument power spectra. Its processing kernel performs all the steps necessary to convert the power spectra into calibrated scattering coefficient values. It takes as input the:
|
It processes these in four stages:
- raw data correction – subtraction of noise floor and removal of internal power gain variations
- normalisation – assign scattering coefficient value to corrected signal power (from LUT)
- coordinate transformation – converts frequency-time reference into spatial coordinates
- spatial averaging – produces required spatial resolution with improved radiometric resolution
The ECPP is used offline to determine corrections to the on-ground characterised antenna gain and pointing from external calibration data. External calibration will use three transponders to provide sufficient across-swath sampling to allow the antenna gain correction factors and de-pointing to be derived. This calibration data is used as input to the L1PP.
The NTG is used to determine the conversion coefficients needed by the L1PP to convert the instrument raw data into scattering coefficient values. These data are calculated offline and stored as a LUT.
The PTS complements the NTG and supports overall verification of the GPP. It can generate ASCAT raw data packets containing simulated measurement data consistent with the imaging of point targets.
The L1PP and PTS allow end-to-end simulations of the ASCAT system, which can be used to verify the implementation of the operational processor.
The GPP is operated through a graphical user interface (GUI). This also supports the analysis software, provides a set of processing tools that allow the generation of test input data sets for various elements of the GPP, and allows offline analysis of output results.