
Science & Exploration
Die Rendezvous-Technik von „Jules Verne“ wurde erfolgreich in Frankreich getestet
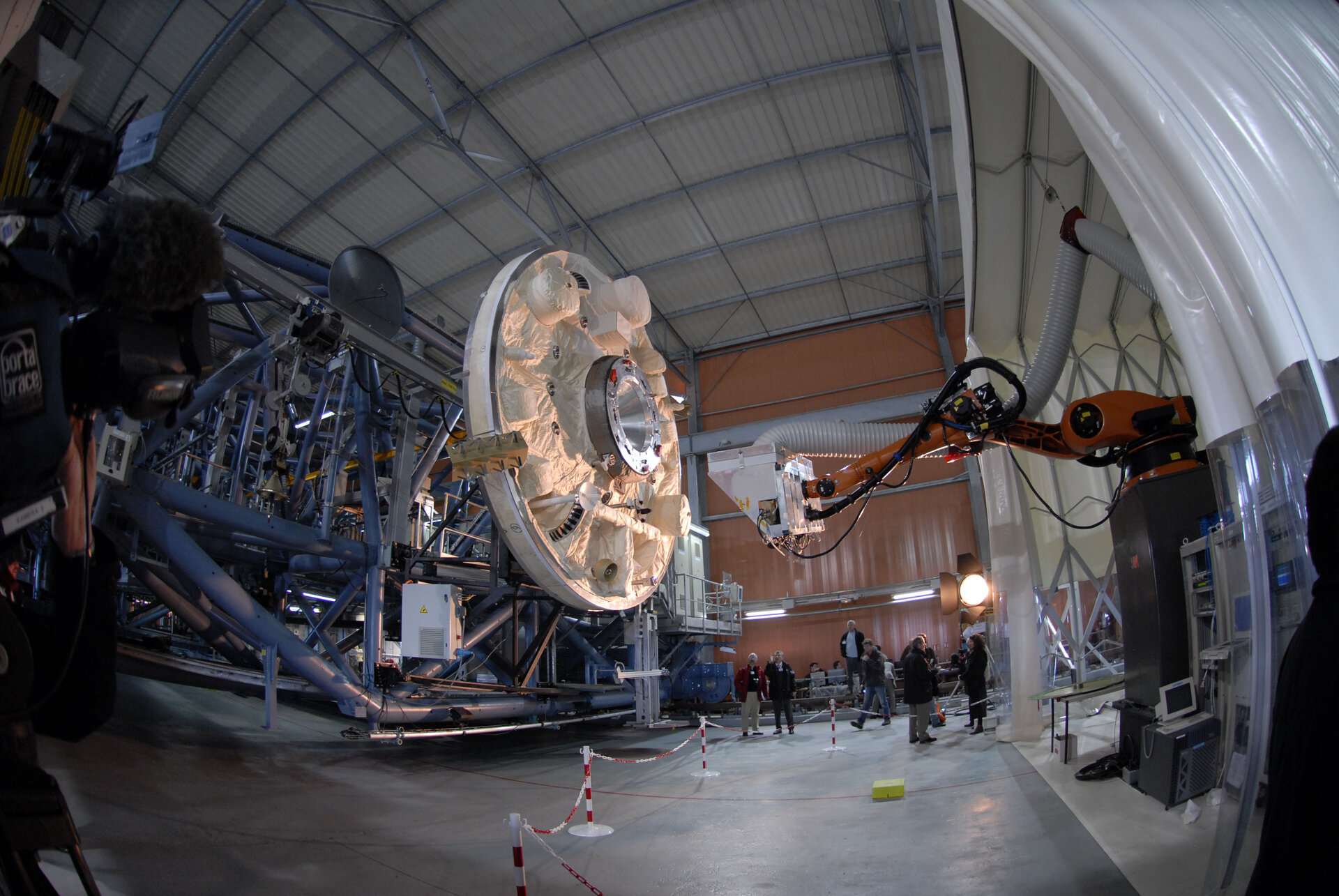
10. November 2006: Eine 120 Tonnen schwere mobile Plattform (links) ist mit einer Reihe von passiven Reflektoren für das Annäherungsmanöver versehen, die baugleich mit denen an der ISS sind. Sie sollen von den ATV-Optiksensorsystemen, welche an einem Gelenkarmroboter montiert sind (rechts), beleuchtet werden und die empfangene Strahlung in Richtung der ATV-Sensoren reflektieren. Die zueinander relativen Bewegungsabläufe zwischen den beiden Komponenten entsprechen den Bewegungen, die im Herbst bei der Annäherung des ATV Jules Verne an die Internationale Raumstation ISS zu erwarten sind.

Jules Verne ATV as seen from the ISS during a rendez…

Docking equipment on the 'nose' of Jules Verne's Int…
Jules Verne ATV as seen from the ISS during a rendez…

ATV Jules Verne
