
Software pro misi ExoMars prošel zkušebními jízdami
Navigační software určený pro misi ExoMars 2020 prošel zkušebními jízdami, k nimž došlo na „martovské zahrádce“ ESA.
Rover ESA ExoMars postupně navštíví několik lokalit a bude vrtat až dva metry pod povrch Marsu, kde má pátrat po zde zachovalých stopách minulého života.
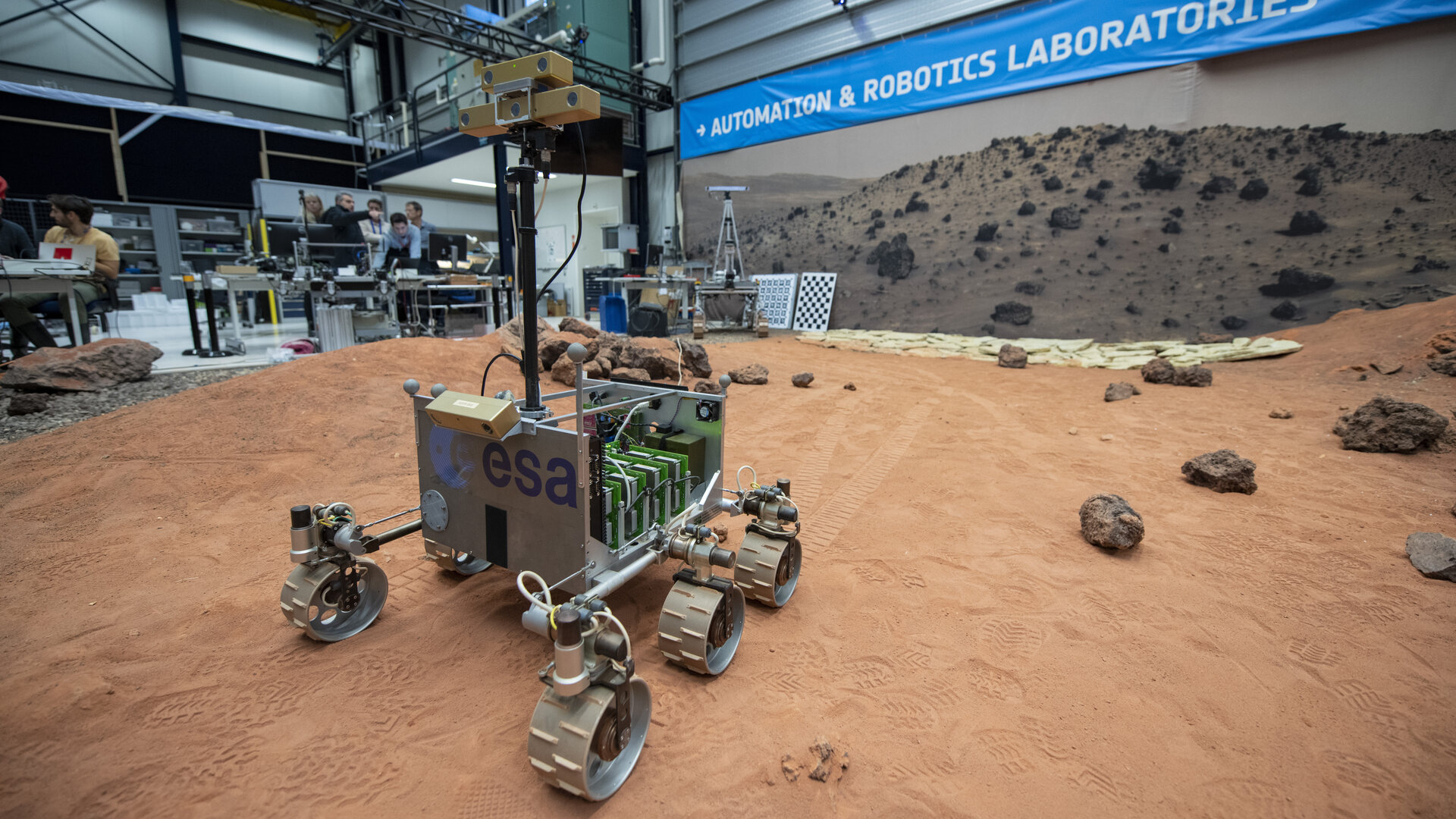
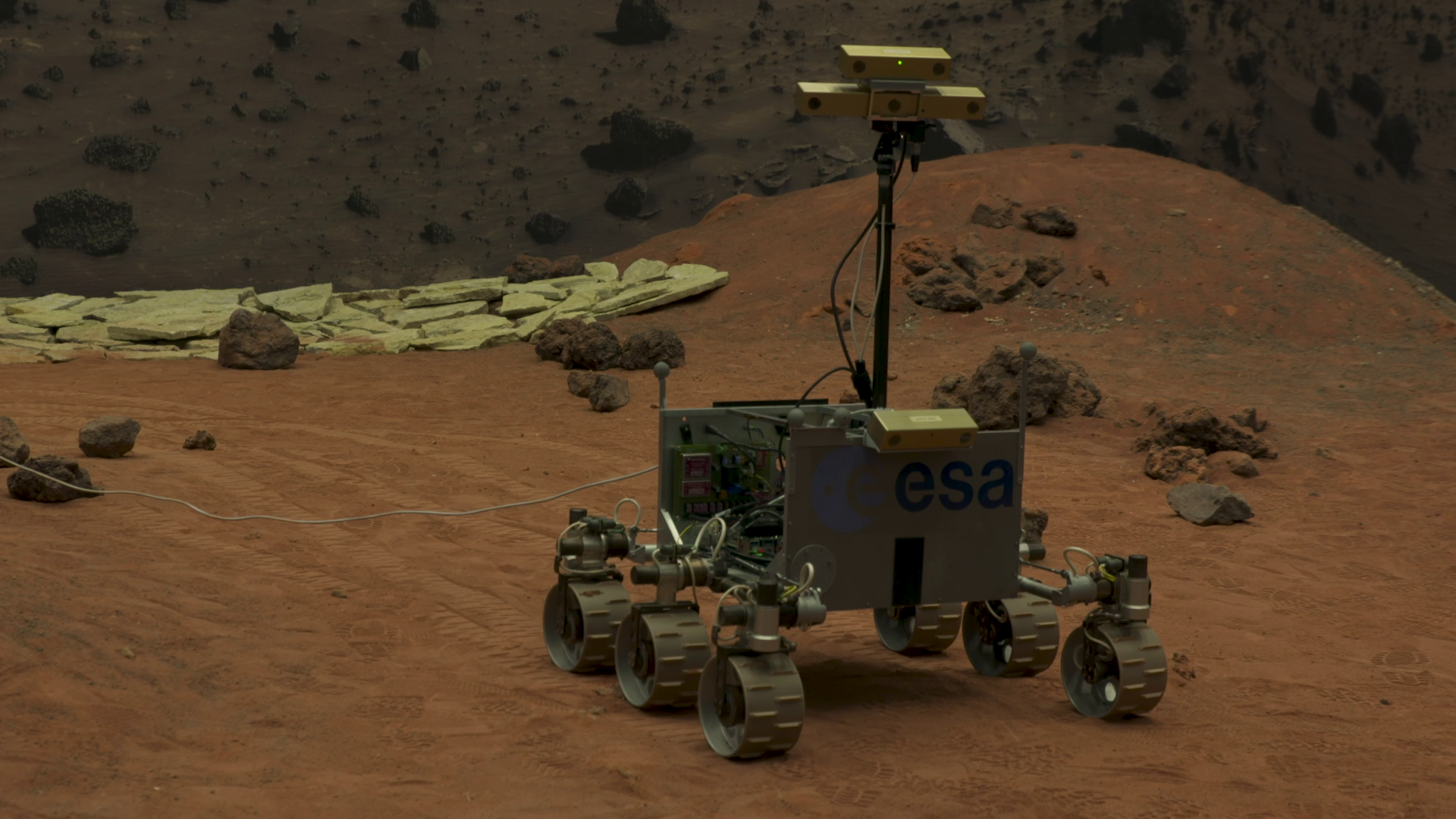
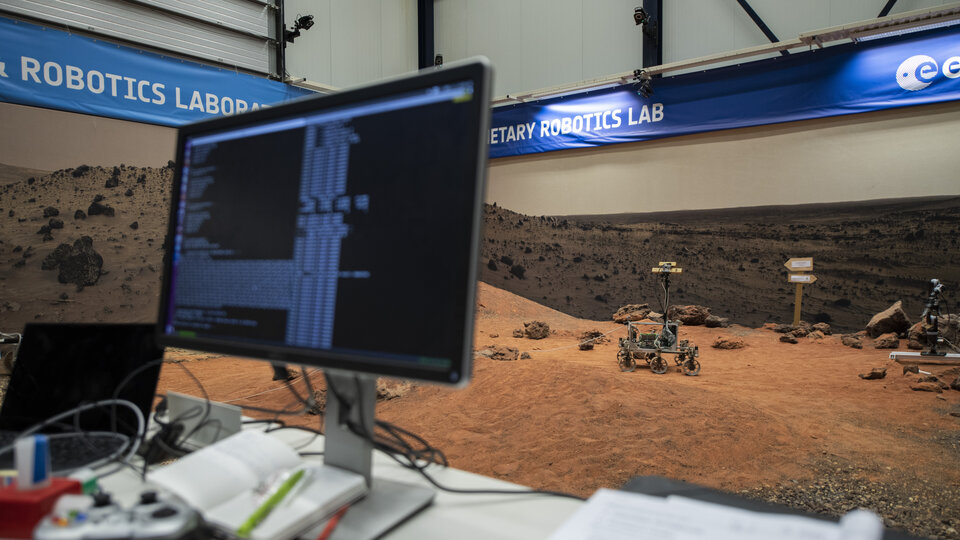
Na polovinu zmenšená verze roveru ExoMars nazvaná ExoTeR (ExoMars Testing Rover) opatrně projíždí po písku mezi červenými kameny na polygonu PUT (Planetary Utilisation Testbed) o rozměru 9 krát 9 metrů, kterému se říká Mars Yard, Martovská zahrádka. Přesně takový obraz byl k vidění v poslední době v laboratoři planetární robotiky ESA v nizozemském ESTECu.

Access the video
ExoTeR pečlivě počítal svoji trasu a postupoval rychlostí 2 metry za minutu. I to je mnohem více, než jak rychle se bude pohybovat skutečný rover ExoMars, který by měl za den urazit 100 metrů.
Dvoudenní test provedli inženýři robotiky ESA, které doplnil tým specialistů z francouzské kosmické agentury CNES z Toulouse. Ti mají více než dvě desetiletí zkušeností s autonomní navigací planetárních roverů, což kulminovalo ve vývoj softwarové sady „AutoNav“, která řízení během testu zajišťovala.

Během roku 2017 byl ExoTeR předán do střediska ALTEC v Itálii, kde je sídlo monitorovacího a řídicího střediska mise ExoMars, aby řídicí tým mohl trénovat s pokročilým roverem. V prosinci se pak zařízení vrátilo zpět do ESTECu k modernizaci svého autonomního navigačního algoritmu.
Následovaly navigační testy, které potvrdily správnou funkci software. ExoTeR se po nich opět vrátil do Itálie, což dovolí řídicímu týmu ALTEC získat zkušenosti s nově přidanými funkcemi autonomní navigace.

Enormní vzdálenost mezi Zemí a Marsem odpovídá prodlevě signálu v rozmezí 4 a 24 minut. Přímá kontrola roveru ExoMars je tak silně nepraktická. Proto bude schopen provádět některá rozhodnutí zcela samostatně.
„Namísto toho, abychom posílali kompletní bezpečné trajektorie pro pohyb roveru, autonomní navigace dovolí poslat toliko cílový bod,“ vysvětluje robotický inženýr ESA Luc Joudrier.
„Rover vytváří digitální mapu svého okolí a počítá, jak se nejlépe dostat k cílovému bodu. Studiem mapy se pokouší představit si umístění roveru na různá místa a řeší, zdali v těchto pozicích bude v bezpečí – nebo jestli kameny nejsou příliš vysoké či terén příliš strmý.“
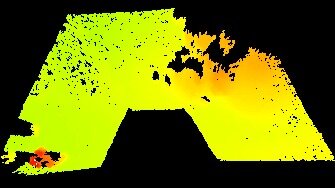
„Díky práci s lokální navigační mapou rover spočítá bezpečnou cestu k cíli a začne se po ní pohybovat. Jakmile urazí její část, provede celý proces znovu, aby se ujistil, že pracuje s aktuální podobou mapy.“
„Jde o obdobu lidské chůze. Díváme se dopředu, když se rozhodujeme, kam zamíříme, ale pak se během chůze díváme pod nohy a pokud je to třeba, změníme směr, abychom se vyhnuli překážkám. Jakmile zvolíme cestu bez překážek, následně si ověříme, že držíme správný směr.“
Rover ExoTeR, podobně jako vlastní rover ExoMars, je vybavený navigační stereokamerou umístěnou na stožáru, takže může digitálně mapovat sklon terénu. A jak se pohybuje vpřed, neustále monitoruje postup s pomocí páru kamer na přední části šasi.
Vizuální sledování pohybu funguje lépe, než prosté odpočítávání otáček kol roveru, protože dovoluje vzít v potaz i případné prokluzování kol. Minulé rovery na Marsu uvízly v hlubokém písku a pokračování otáčení kol by je ve skutečnosti jen „zahrabalo“ hlouběji.
Rover ExoTeR, doplněný o aktualizovaný software, je nyní připravený k návratu do střediska ALTEC v Itálii. Tím řídicí tým získá zkušenost s nově přidanou funkcí autonomní navigace. A to ještě dříve, než bude dokončený operační letový software.
Finální letový software mise ExoMars ve skutečnosti ponese dvě sady autonomního navigačního programu. Druhá verze je vyvíjena společností Airbus v britské Stevenage.
„Tato kombinace přidá roveru více flexibility,“ vysvětluje Luc Joudrier. „Může se stát, že jeden se ukáže jako vhodnější do členitého terénu, druhý pak bude lépe fungovat v jednodušším prostředí.“