El software de ExoMars supera la prueba de conducción
El software de navegación para la misión ExoMars 2020 al Planeta Rojo ha superado la prueba de conducción del róver en el “Mars Yard” de la ESA.
El explorador de la misión ExoMars de la ESA se desplazará a numerosos puntos, donde practicará perforaciones hasta dos metros por debajo de la superficie marciana, en busca de indicios de vida pasada ocultos bajo tierra.
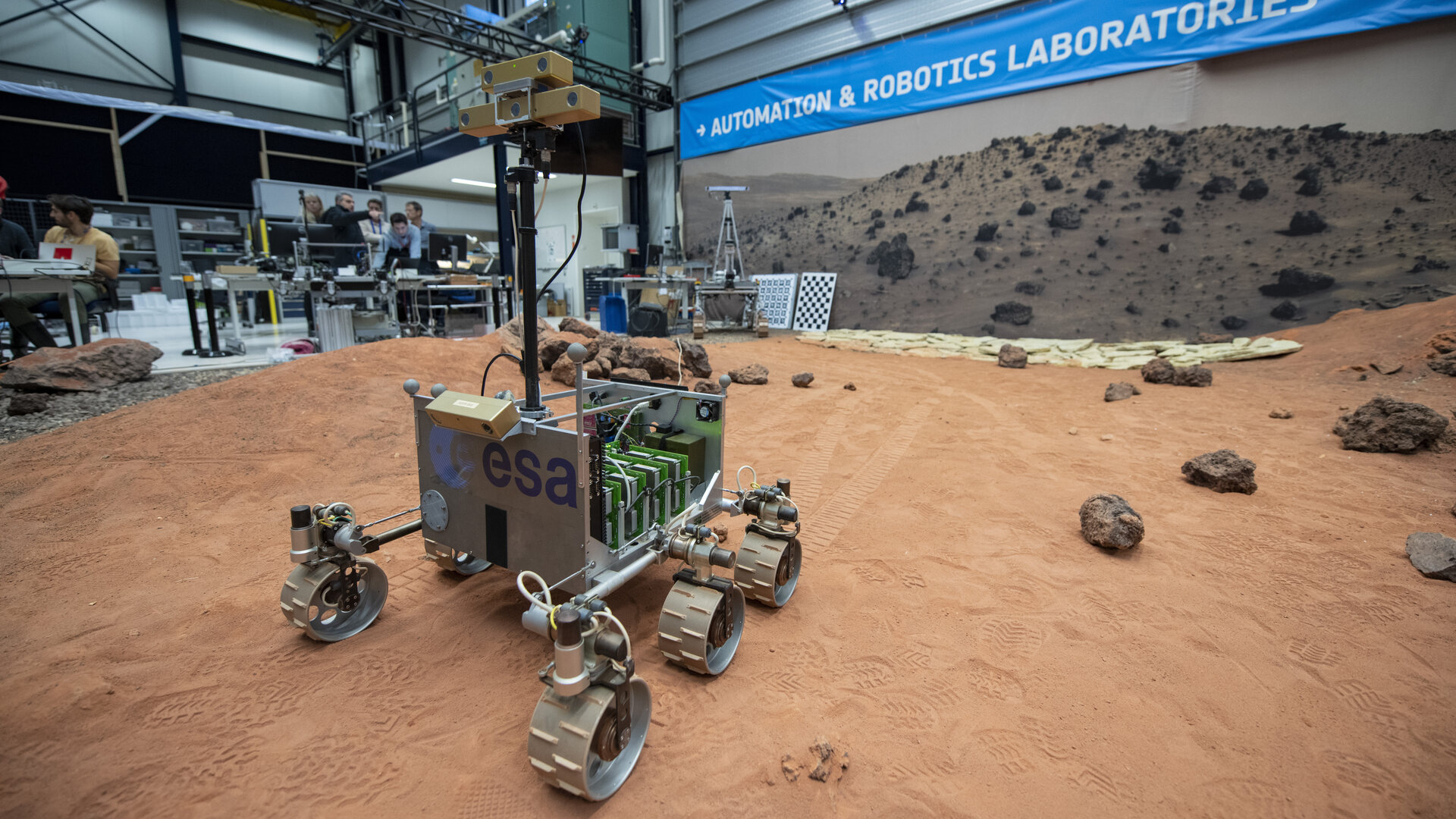
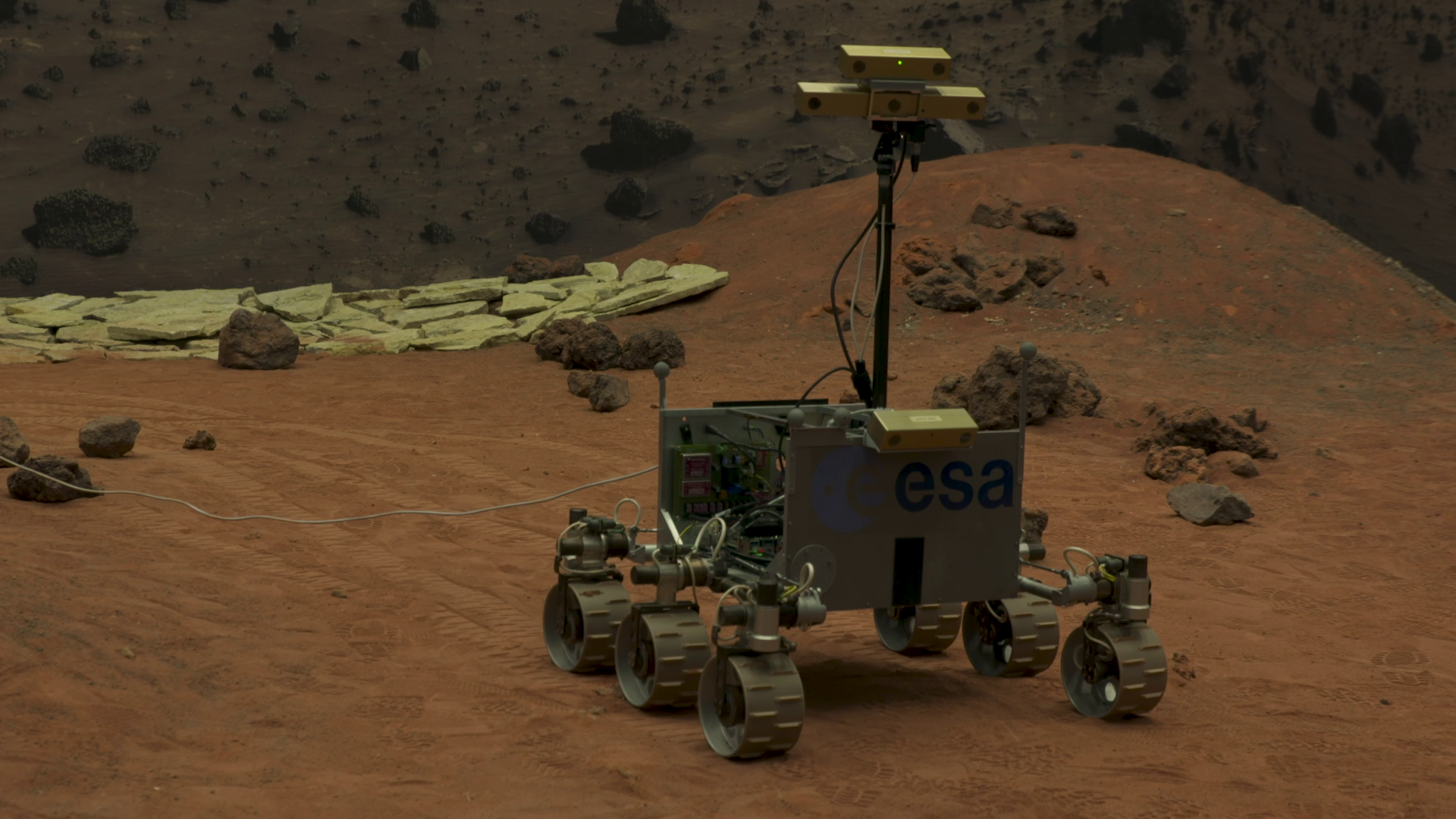
Una versión a mitad de escala del robot de ExoMars, denominado ExoMars Testing Rover (o ExoTeR), se abrió paso cuidadosamente entre los 9 x 9 metros de arena y rocas rojas del Banco de Pruebas de Utilización Planetaria, apodado “Mars Yard”, que forma parte del Laboratorio de Robótica Planetaria de la ESA en ESTEC (Países Bajos).

Access the video
Gracias al cálculo cuidadoso de su ruta hacia delante, ExoTeR se desplazó a una velocidad de 2 metros por minuto, varias veces más rápido de lo que lo hará el róver de ExoMars: 100 metros por día marciano.
La prueba de dos días del róver corrió a cargo de ingenieros robóticos de la ESA, a los que se unió un equipo de la agencia espacial francesa CNES de Toulouse. Estos cuenta con más de dos décadas de experiencia en navegación autónoma de robots planetarios, que se han visto culminadas por el paquete de software AutoNav, encargado de conducir el róver.

Durante 2017, ExoTeR se envió a ALTEC (Italia), el centro de control y monitorización del róver de ExoMars, donde el equipo de control entrenó con el robot avanzado. En diciembre, regresó a ESTEC para una actualización de su algoritmo de navegación autónoma.
Después tuvo lugar la prueba de navegación, que confirmó el buen funcionamiento del software. Ahora, ExoTeR debe enviarse de nuevo a Italia, lo que permitirá al equipo de control de ALTEC adquirir más experiencia al trabajar con la funcionalidad añadida de navegación autónoma.

La enorme distancia de la Tierra a Marte implica un retardo de la señal de entre 4 y 24 minutos, por lo que el control directo de ExoMars no resultaría práctico. Así, el róver será capaz de tomar ciertas decisiones por sí mismo.
“En lugar de enviar trayectorias completamente libres de peligros para que el robot las siga, la navegación autónoma nos permite enviar únicamente un punto de destino”, explica el ingeniero robótico de la ESA Luc Joudrier.
“El róver crea un mapa digital de sus inmediaciones y calcula la mejor ruta para llegar a ese punto. Al mirar el mapa, trata de ubicar el róver en todos esos lugares adyacentes para averiguar si estaría seguro en cada una de esas posiciones, si las rocas son demasiado altas o si la pendiente del terreno es demasiado inclinada”.
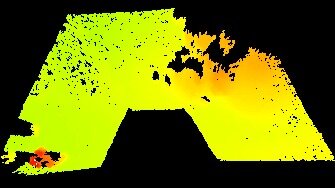
“A partir del mapa de navegación local, el robot calcula el camino más seguro hasta su destino y comienza a desplazarse por un segmento de la ruta calculada; al llegar al final del segmento, repite el proceso para continuar avanzando”.
“En cierta medida es como nuestro caminar. Miramos adelante para decidir por dónde ir, pero a medida que avanzamos, bajamos la vista a nuestros pies y, dado el caso, modificamos la ruta para evitar obstáculos. Una vez que hemos elegido una ruta sin obstáculos, nos aseguramos de seguirla para mantenernos seguros”.
El róver ExoTeR, al igual que el explorador de ExoMars, está equipado con cámaras de navegación estéreo en el mástil que elaboran un mapa digital de la elevación. A medida que avanza, verifica su progreso de forma constante mediante un par de cámaras situadas en el chasis delantero.
El seguimiento del movimiento basado en la visión funciona mejor que la simple medición del giro de las ruedas del robot, ya que permite a los controladores tener en cuenta cualquier deslizamiento de estas: en ocasiones, los robots en Marte se han visto atrapados en la arena profunda, y si las ruedas continuasen girando, se hundirían cada vez más.
El róver ExoTeR y su software actualizado ya están listos para volver a las instalaciones de ALTEC en Italia, donde el equipo de control podrá adquirir experiencia con la funcionalidad adicional de navegación autónoma, antes de que se complete el software de vuelo de ExoMars.
El software de vuelo definitivo de ExoMars estará formado por dos paquetes de navegación autónoma, el segundo de los cuales está siendo desarrollado por Airbus en Stevenage (Reino Unido).
“La combinación debería aportar una mayor flexibilidad al róver —explica Luc—. La idea es que uno podría funcionar mejor en terreno difícil, mientras que el otro podría permitir un avance más rápido por terrenos más fáciles”.