Proba-3 Technologies
A broad range of novel technologies will be essential to make Proba-3 a success. The mission’s formation flying system includes components in both satellites, with a Formation Flying Management system being in charge of scheduling and planning formation flying activities.
The satellites will employ various methods to determine their relative positions. First of all, inter-satellite RF links will be established via an S-band system between the two spacecraft. Around perigee, GNSS receivers will acquire GPS signals and a dedicated relative navigation algorithm will provide the relative position of the satellites. The data will be propagated for the phase of the orbit where GPS signals are not available.
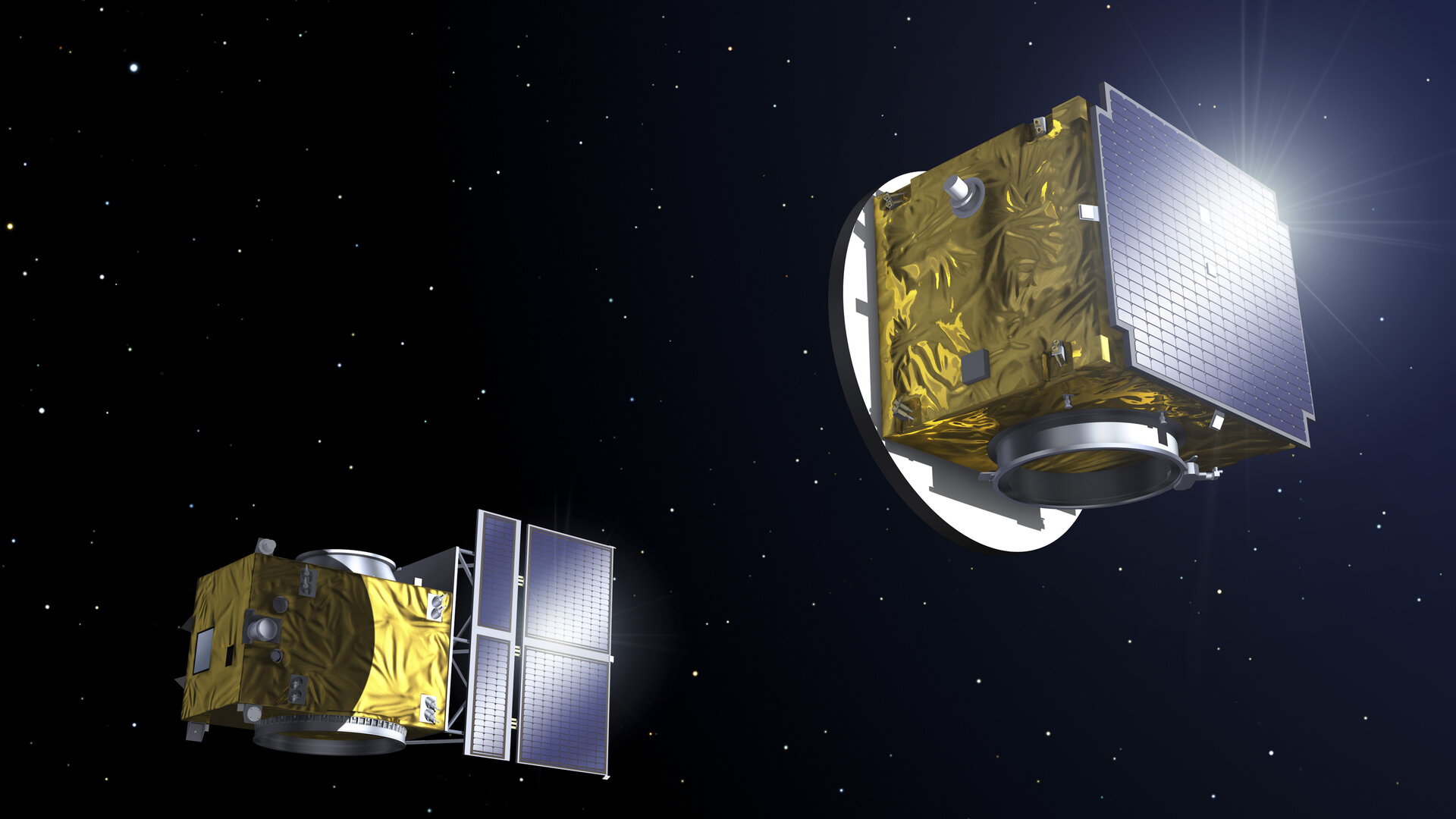
For fine measurements during closer separations of less than 250 metres, this relative GPS system will be supplemented by a visual-based sensor. A set of cameras on the Occulter Spacecraft will image and detect LEDs mounted on the Coronagraph Spacecraft. By processing the centroid of the images, it will return the relative pose-position solution to the on-board navigation. This system has been designed to be robust to straylight such as the reflection of the Sun on the large solar array or on the Earth.
Finally, a fine optical metrology on the Occulter spacecraft will shoot a laser toward a corner cube retro-reflector placed on the face of the Coronagraph spacecraft for tracking of relative position and attitude, achieving millimetre precision.
Star trackers will be used for absolute attitude determination. The high precision requirements demand the co-location of all the star trackers and fine metrology sensors and instrument on an optical bench.
Precision cold gas thrusters – working at 10 millinewton scale – will be placed aboard the Occulter spacecraft to precisely maintain the relative positions of the two satellites.
The Coronagraph satellite will incorporate a one-newton scale monopropellant propulsion system for perigee passage manoeuvres and collision avoidance manoeuvres.
Proba stands for the ‘PRoject for OnBoard Autonomy’ and the decision has been taken to make an expanded use of autonomous on-board control procedures for this mission. The majority of formation flying experiments will take place on an automated and autonomous basis.
Proba-3’s Systems Preliminary Design Review has been successfully passed in November 2012. marking the end of Phase B. The key technologies are reaching TRL 5 and the demanding formation flying software has been prototyped and run closed loop with a simulator. The System Critical Design review was successfully closed in 2018. The Ground Segment Critical Design Review was successfully closed in 2019.