
Space object attitude estimation from ISAR images by applying techniques from computer vision
| Programme: | TRP Workplan | Achieved TRL: | 4 |
| Reference: | T711-401GR | Closure: | 2016 |
| Contractor(s): | GMV (ES), GMB (PT) | ||
Inverse Synthetic Aperture Radar images are an uncommon but robust and available source of attitude information on uncontrolled objects in low Earth orbit. However, due to the range – Doppler nature of these images and high levels of noise, the processing was a manual time consuming task for a human operator. Terrestrial computer vision applications are starting to cope with noisy images and can be tested on radar images as well.
Objective(s)
Automate the attitude information extraction from Inverse Synthetic Aperture Radar images under two conditions by applying computer vision techniques: 1) From sequences and single images when a spacecraft model is known; 2) From sequences when no spacecraft model given. Evaluate if this can outperform a human operator in timeliness or accuracy.
Achievements and status
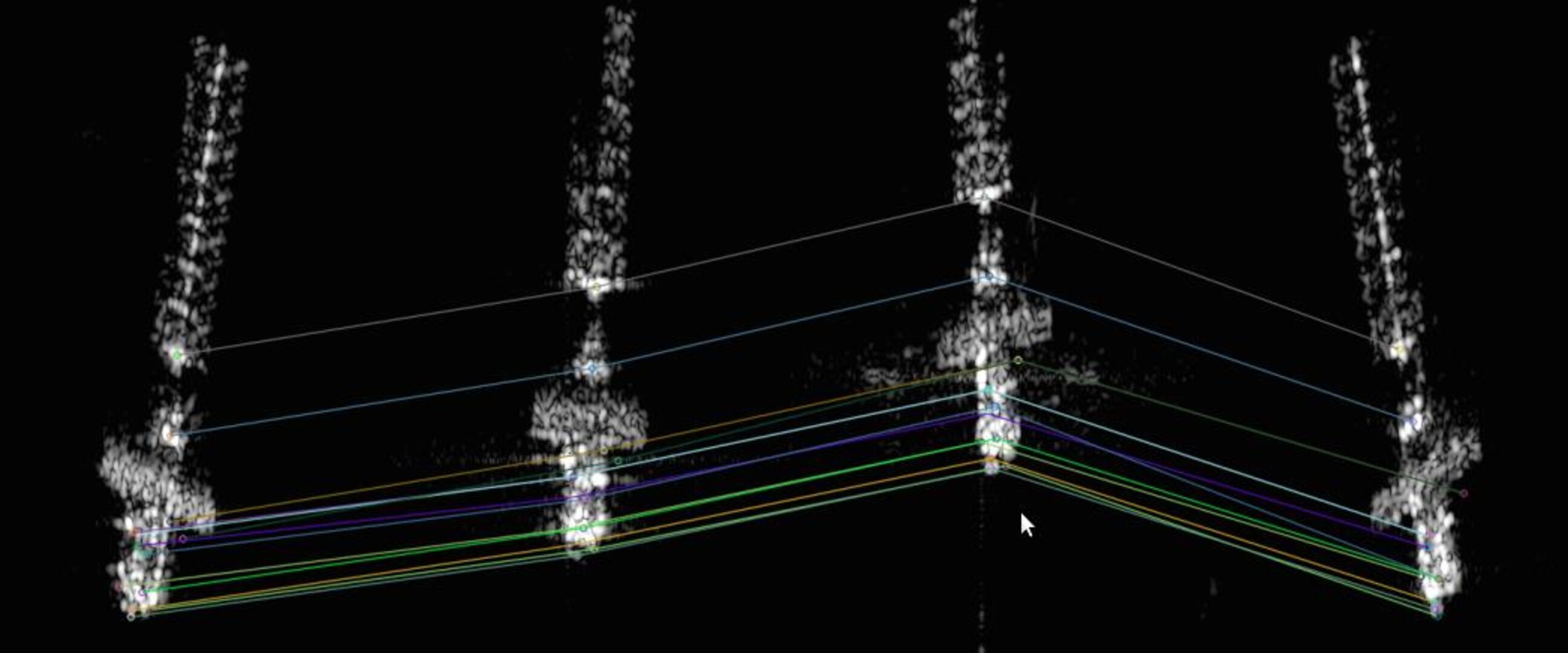
- Extensive testing of shape-from-motion, feature-tracking, and noise reduction algorithms on very challenging (noisy) image sequences.
- Full automation could not compete with human operator in accuracy, however the human score wasn’t that much better either.
- Best algorithms have been implemented in a graphical user interface to aid the operator leading to a significant improvement in timeliness.
Benefits
A significant aid for operators in processing Inverse Synthetic Aperture Radar images data has been developed to prototype level. A forward modeling of the physical response structure has been analyzed to aid understanding in case of contingency situation for ESA missions.
Next steps
The prototype will be further stress-tested in operational context for re-entry predictions. An interface with an on-going GSTP activity on attitude motion determination via sensor fusion (AT/CH/DE) has been established. The technology can be further matured in these activities. From prototype to operational implementation is planned for Q4 2018.