
De Winne 'flies' Station robotic arm
ESA astronaut Frank De Winne operated the International Space Station's robotic arm last Friday to relocate a docking adapter on the outside of the Station's Unity module. The Pressurized Mating Adapter-3 was moved in preparation for the arrival of Node 3 and Cupola early next year.
Together with Expedition 20 crewmate Robert Thirsk, and in close coordination with flight controllers on the ground, De Winne operated the 18-metre robotic arm from inside the International Space Station.
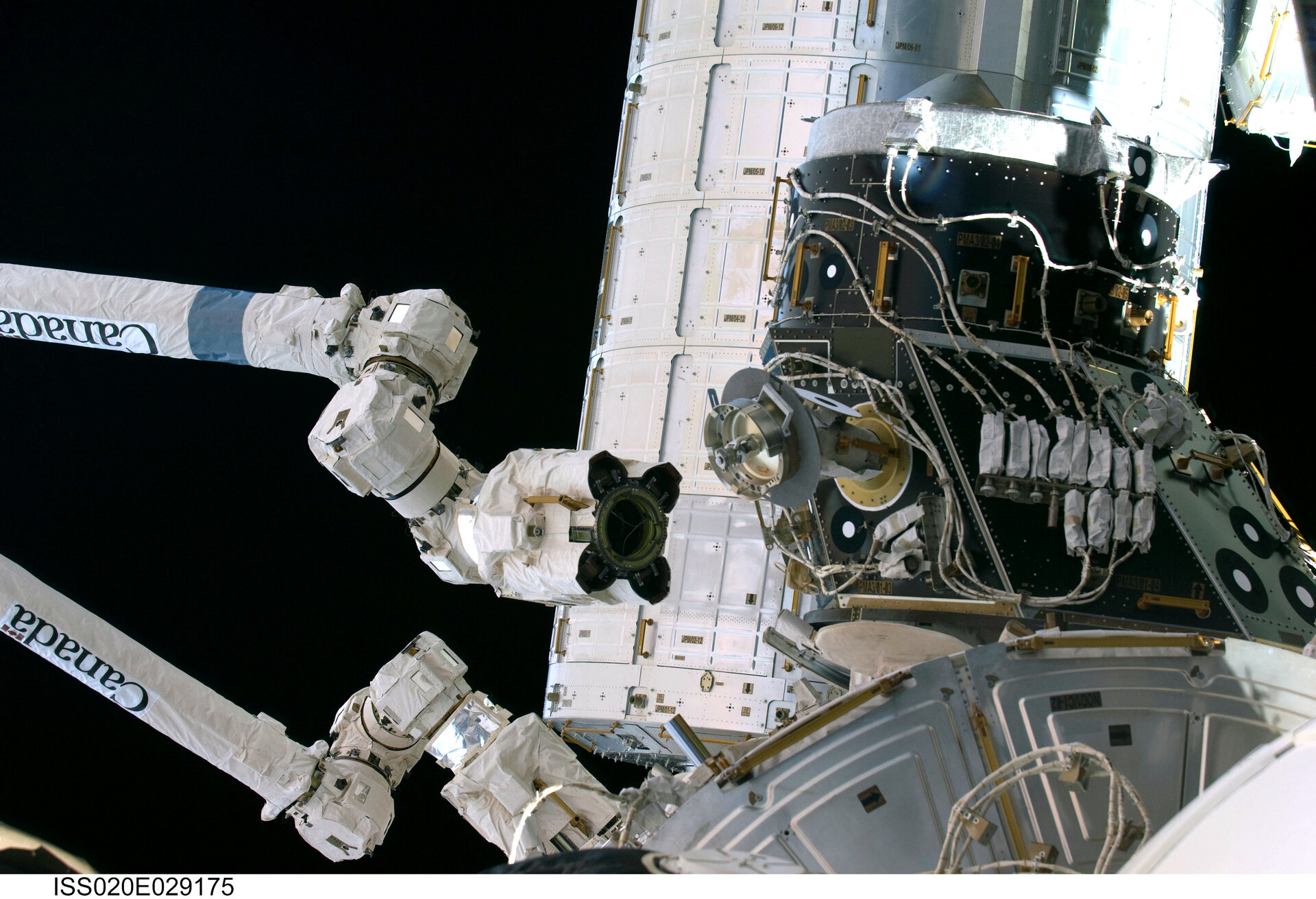
In a procedure lasting around six and a half hours, the Pressurized Mating Adapter-3 (PMA-3) was moved from Unity's Earth-facing port (nadir) to the module's port side common berthing mechanism using the Station's robotic arm, Canadarm2.
PMA-3 is one of three conical Station mating adapters; they are used to interconnect spacecraft and International Space Station (ISS) modules that have incompatible docking mechanisms. The PMA-3 relocation is needed to prepare Unity's port common berthing mechanism for the arrival of the European-built Node 3 module, named Tranquility by NASA, and the Cupola observation module early in 2010.

Working from inside the Station, De Winne and Thirsk got operations underway shortly before 11:00 CEST (09:00 UT). Using the Station's robotic arm they grappled PMA-3 and released the adapter from Unity's nadir port. Commands sent from the ground then maneuvered Canadarm2 towards PMA-3's new location on the left-hand side of Unity. De Winne and Thirsk then resumed control of the robotic arm to reattach PMA-3 to its new berth. The task was completed ahead of schedule around 17:30 CEST (15:30 UT).
Commenting on the robotics operations, De Winne said it had been an exciting day. "Finally I got to do some of the real robotics operations," he said. "The task was not extremely challenging, but still with robotics you always need to be very concentrated and work very correct and attentive not to make the smallest mistake."

"It went very well, actually almost as in the training, even better. The arm flies very stable and the hand controllers are better than in the simulators - they don't get used eight hours every day!" he added. "It was a real great pleasure to work with Bob. We were both very concentrated and very calm, but still worked at a good pace in order to stay ahead of the timeline."
De Winne is trained in the use of both Canadarm2 and the Japanese robotic arm. Later in his mission he will operate the Japanese arm to transfer external payloads from the Japanese H-II Transfer Vehicle (HTV-1) which is set to arrive at the Station in September.


