Spotlight on European Robotic Arm
The European Robotic Arm (ERA) took centre stage last week during a media day held at Dutch Space, in Leiden, the Netherlands. Other European robotic activities were also showcased.
Built by a consortium of European companies led by Dutch Space, the European Robotic Arm is a cooperative venture between ESA and the Russian Federal Space Agency, Roscosmos.
One of ESA's main contributions to the International Space Station (ISS), ERA will be delivered to Russia this summer. Until then the 630 kg robotic arm is in Leiden, and ESA and Dutch Space took the opportunity to present ERA to the press.
Flexible
With its seven joints, the highly flexible robotic arm can move hand-over-hand between fixed base points around the Russian segment of the Space Station. After launch in 2007, ERA will play a key role in the continued construction of the ISS, for maintenance tasks and to assist cosmonauts during spacewalks.
"Once ERA is operational it will allow the cosmonauts more time for other tasks, and improve the efficiency of the ISS," explained Frank Meiboom, Division Manager for Advanced Systems and Engineering at Dutch Space.
Demonstration
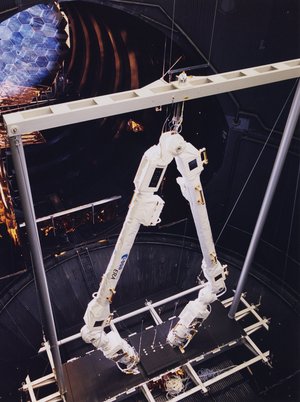
One of ERA's tasks will be to inspect the outside of the Space Station – a task that was demonstrated in the clean room at Dutch Space. Suspended horizontally in mid-air the white-clad ERA engineering model glided smoothly towards a target, stopping, as commanded, just short – close enough for a camera unit to relay images back to the command station.

Philippe Schoonejans, ESA's ERA Project Manager, explained how the European Robotic Arm is also able to transfer payloads to and from the airlock on the Russian Multipurpose Laboratory Module (MLM). "Our Russian colleagues are very keen on this capability of the robotic arm," said Schoonejans. "Fewer spacewalks will be necessary – it will save them time, and it will mean less wear and tear for the Russian EVA suits."
Belgian ESA astronaut Frank De Winne - representing the ERA end users - was also present to meet the media. De Winne, who recently completed training on Canadarm2, the Canadian robotic arm, which is installed on the Station's Destiny module since 2001, participated in a demonstration of the internal and external control stations in the ERA training facility.
Next generation

Although the launch of ERA is more than a year away, those involved in the project are already working on the next generation of European space robotics. Gianfranco Visentin, Head of the Automation and Robotics Section at ESA, introduced the journalists to Eurobot, a three-legged astronaut robotic assistant that is designed to walk over the exterior of the Space Station.
"Eurobot can be programmed for repetitive, predictable tasks, such as transporting items from one location to another on the Station exterior. At the moment this is done during lengthy spacewalks, which can be exhausting for the astronauts," explained Visentin. For more dextrous tasks, such as handling and installing complex hardware astronauts can also operate Eurobot remotely from inside the ISS using a virtual reality display in combination with a wearable harness called Exoskeleton.
The developments in robotics are also important to ESA's future exploration activities. "Everywhere we go in space we will need assistance," said Visentin. "The technologies developed for ERA and Eurobot can be applied and further developed as humans move from Earth orbit to the Moon and on to Mars."