Robot-User Interfacing
While performing any robot operation, a user may interact with the robot in various degrees ranging between two extremes: no interaction and constant interaction. The two control modes associated with these extremes are:
- Off-line programming: everything the robot is asked to do is encoded in a program (in a suitable task description language) , downloaded to the robot controller and executed
- Teleoperation: the user (operator) drives the robot through its tasks by means of suitable human-computer-interfaces
The first mode is suited for applications where the same operation is repeated in a well-known non-changing environment, while the second suits applications where variation of the operation and unknown/unpredictable environment are present, hence requiring continuous human judgement.
Interactive Autonomy
In the course of various R&D activities the A&R section has developed a mode called “Interactive Autonomy” where the benefits of the above modes were combined to achieve maximum flexibility of operation. This is achieved through the partitioning of the robot work into two classes of sub-tasks: the ones that can be carried out by the robot autonomously and the ones that require interaction with the user.
The means for Robot-User Interaction
Of course a user does not interface to the robot directly. The interfacing goes through a chain of devices that on one side convert human intelligible commands into robot commands and on the other side convert robot feedback in human understandable information.
At the beginning of the chain (close to the user) there is a Robot Control Station equipped with a series of Human-machine interfaces (HMI), at the other end there is a robot controller.
According to the type of involvement of the user, different HMI are needed:
- for programming activities the consolidated HMI of computer consoles are adequate
- for advanced programming involving interaction with 3D computer models, joysticks and space-mouse could be used
- for limited teleoperation, set of joysticks have been traditionally used
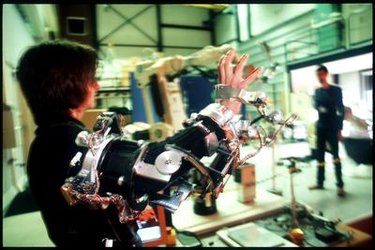
- for advanced/immersive teleoperation with force feedback master-arms and Exoskeletons are the clear choice
The A&R Section has been developing through a number of R&D activities, Robot Controllers and Robot Control Stations to make use of the Interactive Autonomy mode.
Since this mode allows to integrate seamlessly programming and teleoperation modes, further activities have targeted the integration of arm Exoskeletons into the developed Robot Control Stations