The EUROBOT Testbed
The Testbed has been developed in order to support the EUROBOT project. Its purpose is to demonstrate some of the operational capabilities of EUROBOT and to showcase some of the technology developed by the Automation and Robotics Section for EUROBOT
Uses
The testbed functions as:
- Demonstrator of the operational capabilities of EUROBOT;
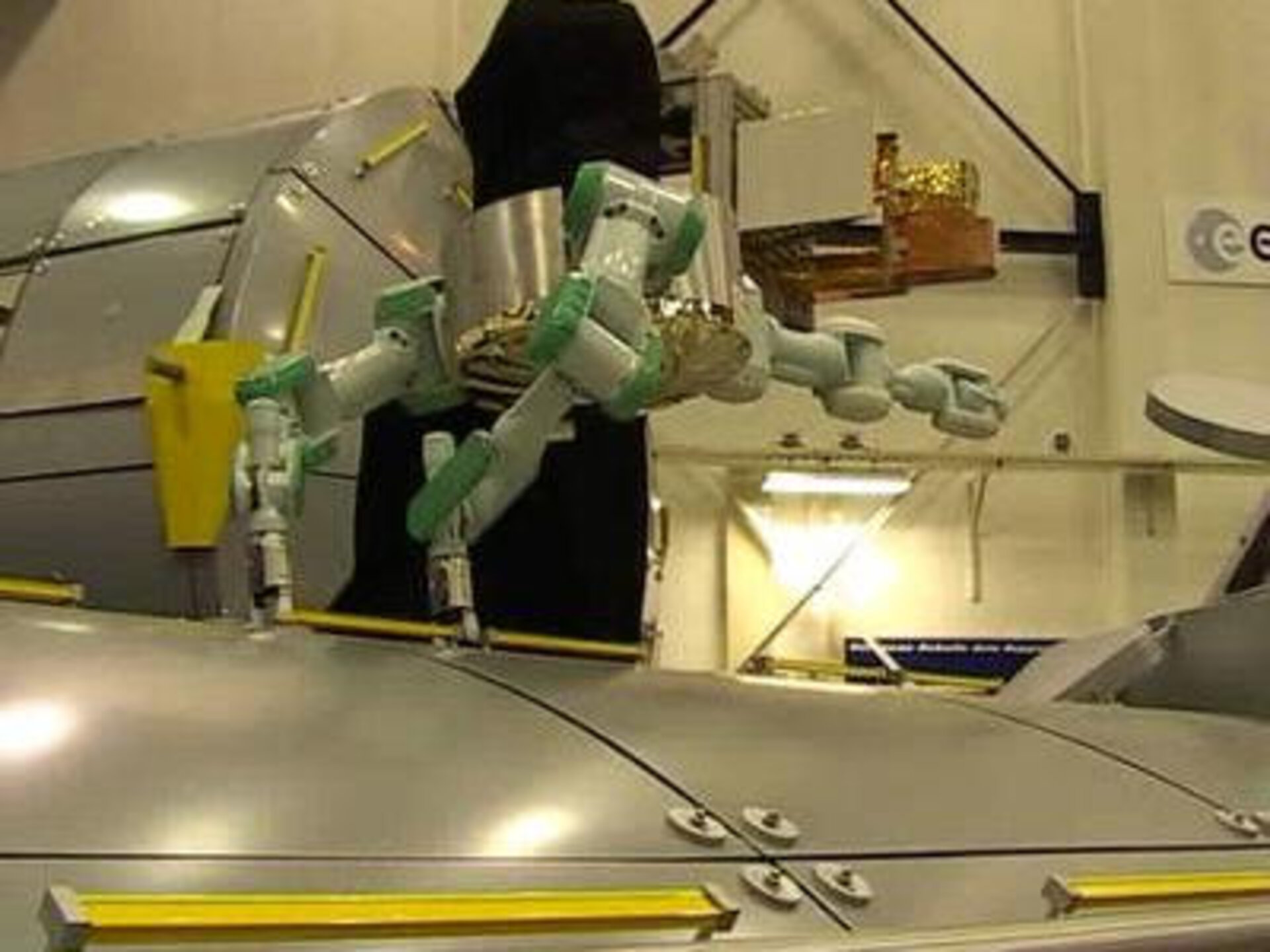
- Autonomous locomotion on ISS modules: the robot system is capable to walk on sections of real-scale modules of the ISS using handrails
- Dexterous manipulation of ISS hardware: an operator, equipped with some human-machine interface, can command the robot to perform highly dexterous handling of objects
- Development and integration environment for some of the technologies used in EUROBOT such as:
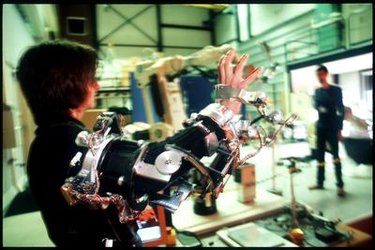
- The ESA Exoskeleton
- The CONTEXT robot controller
- The VIMANCO Vision Based Robot control software
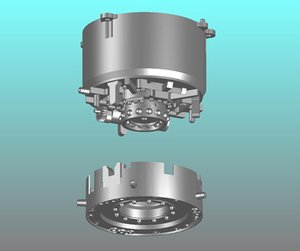
- The DEXARM robot arm
- The CTED tool exchange device
- The A-DREAMS robot control station
A general demostrator for Robot operational modes

The testbed can demonstrate the 2 general operational modes developed by ESA for servicing robots:
- Interactive Autonomy and
- Haptic Telemanipulation