

ARTIS: a step towards an end-to-end robotic tele-echography service
On 20 November 2007, ESA kicked off the project "Advanced Robotic Tele-echography Integrated Service" (ARTIS). Led by the Institute for Space Physiology & Medicine (MEDES) in Toulouse, France, this 24-month project aims at validating a complete end-to-end robotized tele-echography service.
ARTIS combines know-how and technologies developed for Human space flight activities and communication by satellite and is funded through the Agency's General Studies Programme (GSP)
The main objectives of this activity are:
to assess the feasibility and sustainability of tele-medical assistance services using multi modal imaging techniques. The implementation of such a service for a tele echography concept developed with the support of ESA will be used as a test case in ARTIS in different pilot sites;
- to assess the usefulness of satellite-based tele-medical assistance services, where such infrastructure is mandatory and/or can enhance multi modal imaging services.
A wide range of potential applications
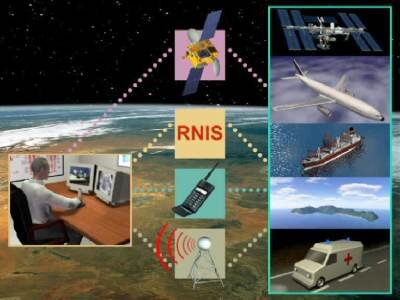
A service based on the tele-echography technology has clear dual interest: it is not only useful for diagnosis during crewed Earth-based mission simulations (e.g. expedition in a Lunar or Martian base analogue such as the Concordia station in Antarctica) or space travellers, but also for terrestrial medical support applications either in remote locations or because of a lack of local specialists. Indeed, explained Dr Didier Schmitt, ARTIS project manager, “many emergency situations require quick response and highly skilled medical expertise that can only be provided with a service via satellite telecommunications".In such contexts, diagnosis based on ultrasound or other medical imagery is crucial to facilitate the choice of doctors between local treatment or evacuation to a specialised medical centre. Such situations can be encountered for instance in peace keeping missions, ad hoc support during natural disasters, isolated and/or mobile contexts (e.g. large cruise ships, oil rigs, islands, isolated villages, sanitary evacuations), or even the fight against the worldwide unequal distribution of healthcare (medical services, expertise and hardware). In addition, “non-urgent or programmed medical examinations, such as in obstetrics, could make use of such medical assistance service in many remote locations to avoid pregnant women travelling long distance” explained Dr Schmitt.
A logical continuation of ESA activities in this field
Upcoming long-duration ISS stays and future manned exploration missions will require the use of different medical tools in order to diagnose crews’ health problems. Among various medical imaging techniques, echography is the most promising with regards to the numerous advantages offered by this modality (e.g. non-invasive and harmless real-time access to anatomical and functional information about the patient). In addition, its implementation and use are quite straightforward partly because ultrasound scanners have become user-friendly, compact and lightweight systems compared to other medical imaging tools such as magnetic resonance imaging or X-ray-based computerized tomography systems. Last but not least, echography has also become more affordable than other medical imaging techniques.“Its main drawback remains, however, its operator-dependence as far as experienced personnel is required to capture and interpret dynamic images” explained Prof. Phillipe Arbeille, echography and doppler expert at UMPS (Unité de Médecine et Physiologie Spatiale) in Tours, France. In this context, tele-echography has been studied in the frame of an ESA MAP project. The concept proposed by Prof. Arbeille at UMPS in Tours and the LVR laboratory in Bourges, France, is to use an ultrasound probe handler capabable (with the assistance of non-sonographer personnel) to be either tele-operated by a medical sonographer expert located remotely from the site where patients are examined, or to carry out locally an autonomous ultrasound scan that can be transmitted and then analysed offline by the medical expert. A clinical validation performed on more than 350 patients has proven that trained sonographers using robotised tele-echography can deliver diagnostics similar to the ones obtained through conventional examinations and which are as reliable.
Towards a sustainable end-to-end service

The developed technology, supported by ESA, has been investigated both technically and clinically and has proven its added value. “However, while the technology itself is ready, the supporting medical assistance service infrastructures do not exist as of today although they are indispensable for its operational use and commercialisation” underlines Aurélien Pisseloup, who has followed the project at ESA since many years.As a result, the ARTIS project was initiated to develop the necessary elements of the value chain and carry out the validation of a complete end-to-end tele-echography service. According to Arnaud Runge, biomedical engineer supporting the project at ESA, “the idea is to propose a proper remote diagnosis service adapted to users’ needs and to see if it can become sustainable. In case of success, such a service could be extended to other medical diagnosis techniques such as magnetic resonance imagery (MRI) or computed-tomography scanners”.The consortium headed by MEDES is currently defining operational scenarios, selecting the pilot sites that will implement and test the ARTIS service platforms. “The beginning of the operational phase is currently scheduled for the end of this summer. ARTIS service platforms will then be used in real conditions to validate clinical as well as operational models” highlights Arnaud Runge.
For more information, please contact:
Arnaud Runge
Biomedical Engineer Arnaud.Runge @ esa.int

