Technology leaps let SMOS follow Earth’s water
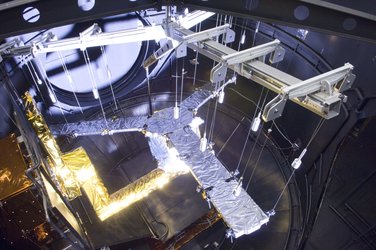
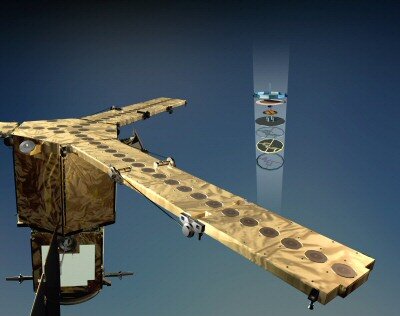
It is a radio telescope in Earth orbit, but instead of peering out at the Universe, ESA’s SMOS satellite will map faint radio signals emitted by our planet’s watery skin. A mission like none before, the underlying technologies that make SMOS possible took 17 years to develop.
‘Follow the water’ is a central theme of space missions investigating the potential habitability of Mars and other Solar System environments – life is possible only where water is available. ESA’s Soil Moisture and Ocean Salinity (SMOS) mission takes this basic concept and applies it to our home planet.
Known as ESA’s Water Mission, SMOS is the first dedicated to global measurements of key geophysical parameters that Earth scientists have sought for the last four decades: soil moisture over land and salinity levels in the oceans.
The value of these data was grasped first in the fields of agriculture and water management – to estimate food availability and track desertification processes – then more recently in wider terms of the water cycle to benefit weather forecasting and climatology. Soil dampness influences regional weather patterns, while sea saltiness is a major driver of ocean currents.
Developing the technology
Why has it taken so long to design a space mission to map these parameters, when the scientific community values them so highly?
“It comes down to technological difficulty,” explains Manuel Martin-Neira, ESA Payload Engineer for SMOS. “ESA started development of the SMOS instrument, known as MIRAS (Microwave Imaging Radiometer using Aperture Synthesis), back in 1992 and it took us until the end of the century to develop all the component technologies, and years more to build the first engineering prototype.”
Expertise from the Electrical, Antenna, Mechanical, Optoelectronics and other Technical Directorate divisions was combined with specialist Earth Observation and Earth Science knowledge in a MIRAS Demonstrator Pilot Project. The aim was to produce engineering model ‘breadboards’. First came the various MIRAS components and then a complete end-to-end system. This took the form of an airborne demonstrator: its design started in 1998 and it was flown for the first time in 2006.
The overall MIRAS demonstrator was supported through ESA’s Basic Technology Research Programme (TRP), dedicated to supporting new technologies, while the creation of its various components was backed by the General Support Technology Programme (GSTP), which fosters the development of flight-ready hardware. The Airborne MIRAS (AMIRAS) flights themselves were supported through the SMOS project.