ISS and Europe’s Major Contributions
Columbus

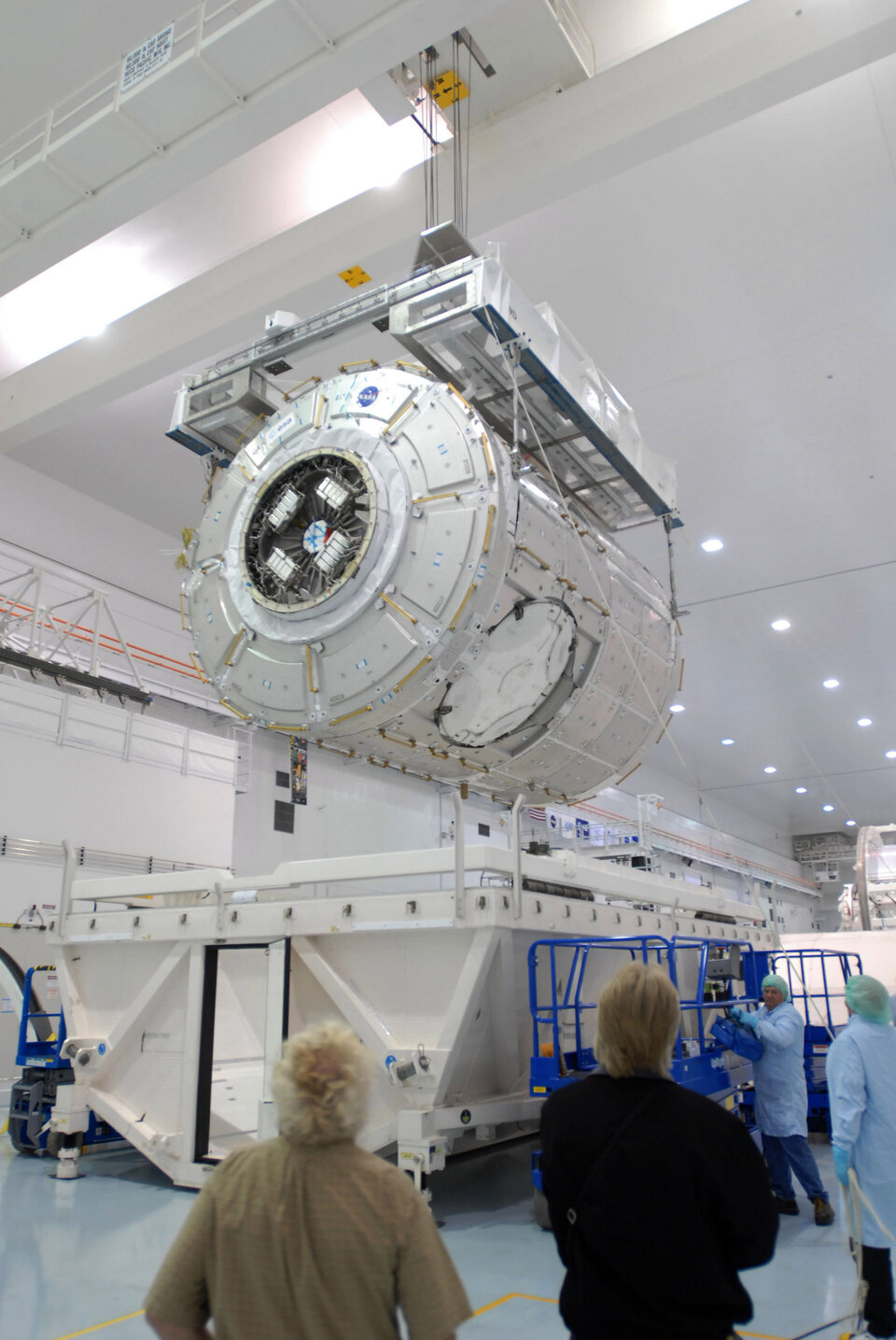
Columbus, launched in February 2008, is ESA’s research laboratory on the International Space Station. It provides space for research facilities in the fields of material science, fluid physics and life science.
In addition, an external payload area can accommodate hardware for space science, Earth observation, technology and innovative sciences. Columbus is permanently stationed at the ISS, attached to another European-built module, Node-2.
Node-2 and Node-3
Nodes are pressurised modules that connect the research, habitation, control and docking modules of the ISS. They are used to control and distribute resources between the connected elements. The ISS will finally have three Nodes. Node-1, called Unity, was developed by NASA. It became the second module of the ISS in orbit after its launch in December 1998. Node-2 and -3 were developed under an ESA contract with European industry, with Thales Alenia Space as the prime contractor.
Node-2 became the first European-built Node to be launched, on 23 October 2007. It acts as a connection point for Columbus, the US Destiny laboratory and Japan’s Kibo laboratory. It is also the attachment point for Japan’s H-II Transfer Vehicle, carries a docking adapter for the US Space Shuttle, and acts as an attachment point for the Multi-Purpose Logistics Modules (MPLMs). The MPLM is a pressurised cargo container that travels in the Space Shuttle cargo bay. Node-2 also provides a work base for the Space Station Remote Manipulator System, a Canadian robotic arm called Canadarm 2.
Node-3 will become the second European-built Node to arrive, on the STS-130 mission in February 2010 to be attached to Node-1. The Earth-facing port of Node-3 will house the European-built Cupola.
Ownership for Node-2 was, and for Node-3 will be, transferred to NASA as part of a barter agreement between ESA and NASA.
Automated Transfer Vehicle (ATV)

The Automated Transfer Vehicle is Europe’s unmanned supply vehicle for the ISS. It was first launched from Europe’s Spaceport in Kourou, French Guiana, on 9 March 2008. It can deliver up to 7.5 tonnes of cargo to the ISS, boost the station to a higher orbit and remove up to 5.5 tonnes of waste. It measures 10.3 m long by 4.5 m in diameter, with a solar array spanning more than 22 m for generating electrical power. Cargo includes hardware, water, air, nitrogen, oxygen and attitude control propellant.
European Robotic Arm (ERA)
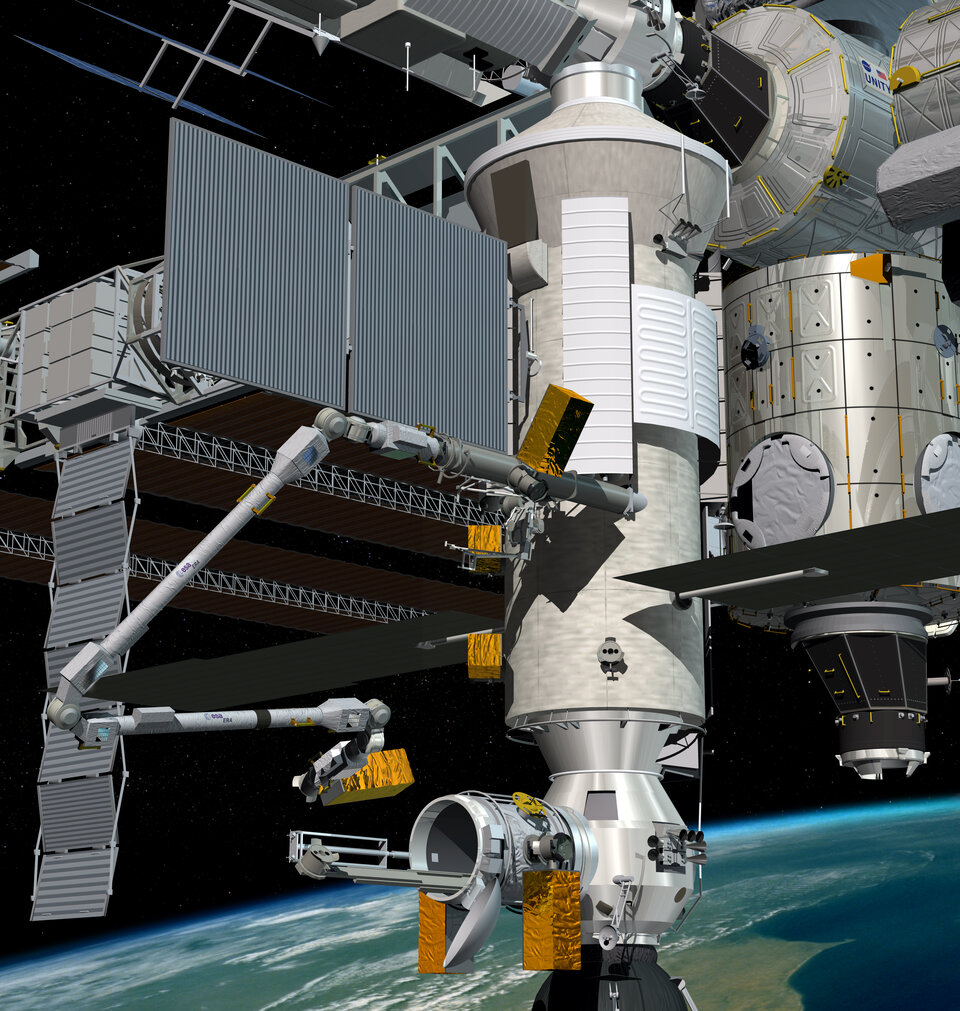
ERA is a robotic arm for installing solar arrays on the Russian section of the ISS, acting as an inspection tool and carrying out assembly and replacement work, such as on the Russian Research Module and Multipurpose Laboratory Module. The 11 m-long ERA also supports and transfers astronauts on spacewalks. It has an extensive range, as it is able to ‘walk’ around the Russian segment manipulate up to 8000 kg. ERA is scheduled to arrive at the ISS in 2011.
Data Management System (DMS-R)
Europe’s DMS-R Data Management System was the first piece of European hardware on the ISS, in July 2000. It includes three fault-tolerant computers and two control posts. It is the ‘brain’ or control centre of the Russian segment and carries out a significant part of the vital and fundamental functions on the station, including: guidance, navigation and control of the entire ISS; failure management and recovery; and control of other ISS systems and subsystems.
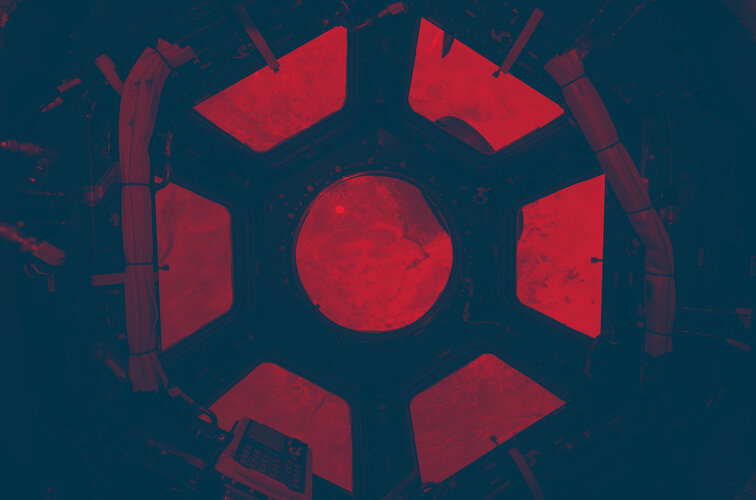
Cupola Observation Module

Cupola will be a panoramic control post for the ISS, a dome-shaped module with windows to observe and guide operations the outside the Station. The pressurised module will accommodate command and control workstations and other hardware.
Through the Robotics Work Station, astronauts will control the Station’s robot arm, which helps with the attachment and assembly of the various Station elements. However, Cupola is more than a workstation. With a clear view of Earth and celestial bodies, it will have scientific applications in the areas of Earth observation and space science as well providing psychological benefits for the crew.