

Kraftübertragung von Astronaut zu Maschine
Es war eine Premiere in der Weltraumrobotik: Auf der Internationalen Raumstation (ISS) wurde erstmals ein kompletter Testlauf eines ESA-Experiments mit „Force-Feedback-Joystick“ (Joystick mit Kraftrückmeldung) durchgeführt.
Stellen Sie sich Aufgaben vor, die wir Menschen ohne hinzusehen mit den Händen erledigen, wie zum Beispiel das Tippen am Computer oder das Binden der Schnürsenkel. Die Kraftrückmeldung bei solchen Aufgaben geschieht mittels des Tastsinn, der uns Gespür an unseren Händen und Fingerspitzen verleiht.
In der Robotik angewendet, könnte dieses menschliche Tastempfinden eine leichtere und natürlichere Fernsteuerung von Robotern ermöglichen und so auch im Weltraum oder anderen abgelegenen Gebieten zum Einsatz kommen.
Dadurch könnten Roboter in Tausenden oder Zehntausenden Kilometern Entfernung gesteuert werden und dort sogar hochkomplexe Aufgaben an Objekten auf die gleiche Weise ausführen wie ein Mensch mit seinen eigenen Händen.
NASA-Crewmitglied Barry Wilmore übernahm die Steuerung des Force-Feedback-Joysticks, deren Ziel es war, Informationen zu physiologischen Faktoren wie Tastsinn und Grenzen unserer Sinneswahrnehmung zu sammeln. Den ersten Testdurchlauf schloss er am 31. Dezember 2014 ab.
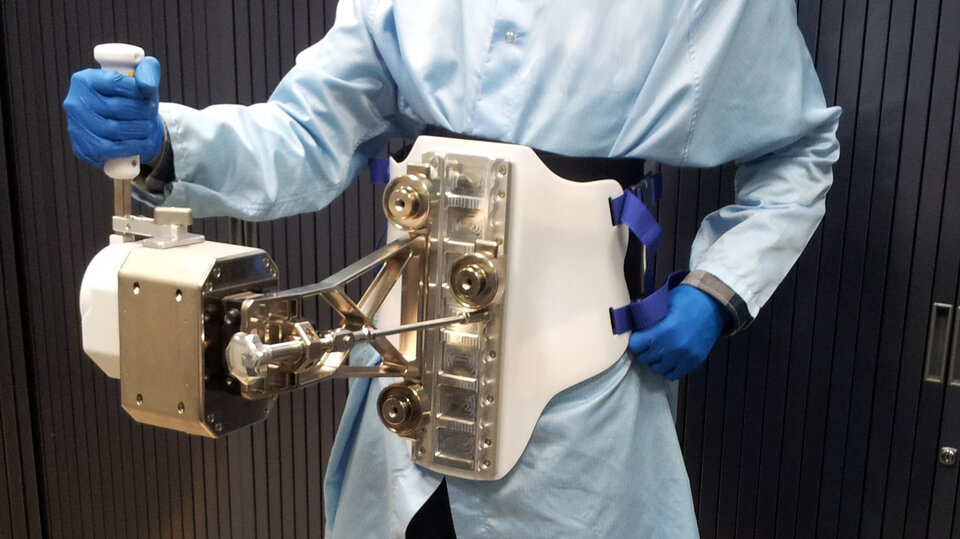
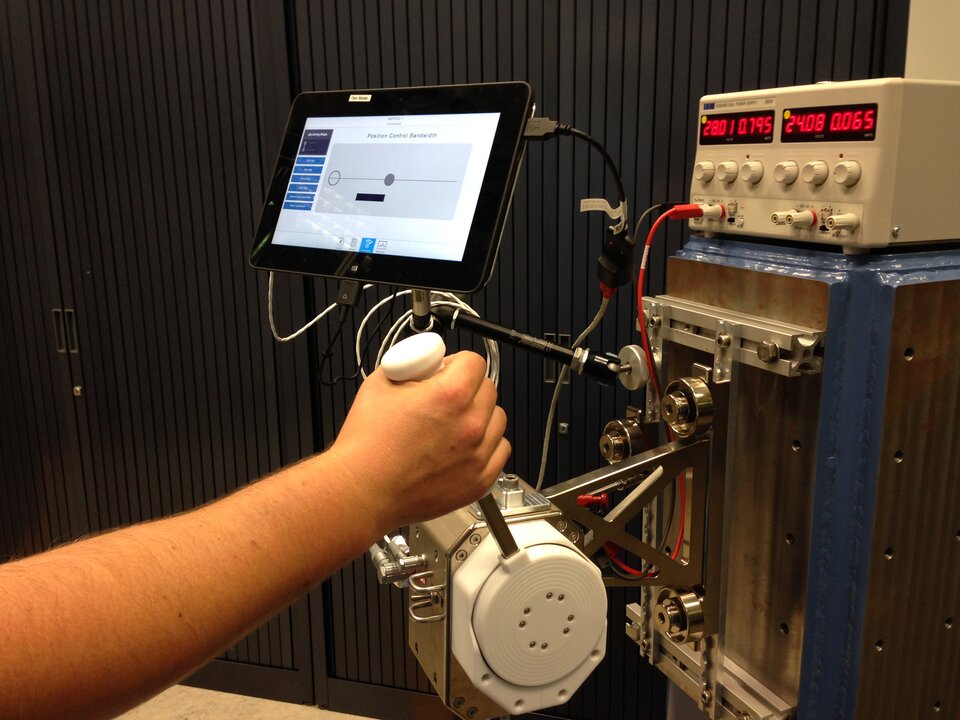
Der verblüffend simpel aussehende Roboterarm ist mit einem Servomotor verbunden, der jeglicher Kraft standhalten kann, die durch einen Astronauten auf ihn ausgeübt wird. Gleichzeitig produziert dieser Roboterarm Kräfte, die der Astronaut im Gegenzug spürt. Dieser Kraftaustausch ist vergleichbar mit der Reaktion eines herkömmlichen Videospiel-Joysticks, sobald der Spieler auf ein virtuelles Hindernis trifft. Der Joystick ist in der Lage, derartige Kräfte in extrem hoher Auflösung zu messen.
Um zu verhindern, dass ein Astronaut bei der Anwendung des Joysticks durch die Schwerelosigkeit in seinen Bewegungen beeinträchtigt wird, kann dieses Experiment – mit dem Namen„Haptics-1“ – entweder per Gurt am Körper oder an der Stationswand befestigt werden.
„Unser Haptics-1-Experiment ebnet den Weg zu einer vollkommen neuen Generation von kombinierten Mensch-Roboter-Missionen“, erklärt André Schiele, Experimentleiter und Gründer des ESA-Labors für Telerobotik und Haptik.
Haptics-1: Erstes Weltraum-Experiment mit Einsatz von "Force-Feedback-Joystick"
„Bis ins kleinste Detail untersuchen wir die Grenzen der menschlichen Wahrnehmung und unsere Fähigkeit, Feingefühl und Manipulationen mit unseren Gliedmaßen und Händen in einer schwerelosen Umgebung auszuüben. Das bringt uns dem Verständnis näher, welche technologischen Grenzen sich bei der modernen Roboter-Ausrüstung auftun, und damit dem Ziel, menschlichen Astronauten die Fernsteuerung von robotergeführten Aufgaben im Weltall zu erleichtern.
Haptics-1 misst nicht nur die physiologischen Faktoren, sondern bietet darüber hinaus auch wichtige Einblicke in die Kraftrückmeldung von ferngesteuerten Roboter-Systemen und inwiefern sie die menschliche Wahrnehmung im All beeinflusst. Anhand dieser Messungen können bei der Entwicklung fortschrittlicher Robotersteuerungsgeräte die realitätsgetreuen menschlichen Wirkungskräfte durch eine robotische Schnittstelle in schwereloser Umgebung nachgeahmt werden. Haptics-1 ist das allererste Weltraum-Experiment, bei dem ein Gerät mit Kraftrückmeldung eingesetzt wurde. Weder die ESA noch die NASA oder irgendeine andere Raumfahrtnation hat bislang Erfahrungen auf diesem Gebiet gesammelt,“ so André Schiele weiter.
Zukünftig könnte es Realität werden, dass Astronauten auf Weltraummissionen Echtzeitsteuerungen von Rovern auf einem Planeten durchführen, bei denen sie ihre menschlichen Fähigkeiten und ihre Intuition für die Erkundung außerirdischer Umgebungen nutzen, ohne den Gefahren der Landung ausgesetzt zu sein.
Solch eine fortschrittliche Fernsteuerung von Robotern kann auch auf der Erde vielfältig und nutzbringend eingesetzt werden, zum Beispiel in Gegenden, die für Menschen unzugänglich oder gefährlich sind, wie die Tiefsee oder kontaminierte Gebiete.





