-
StoryScience & Exploration
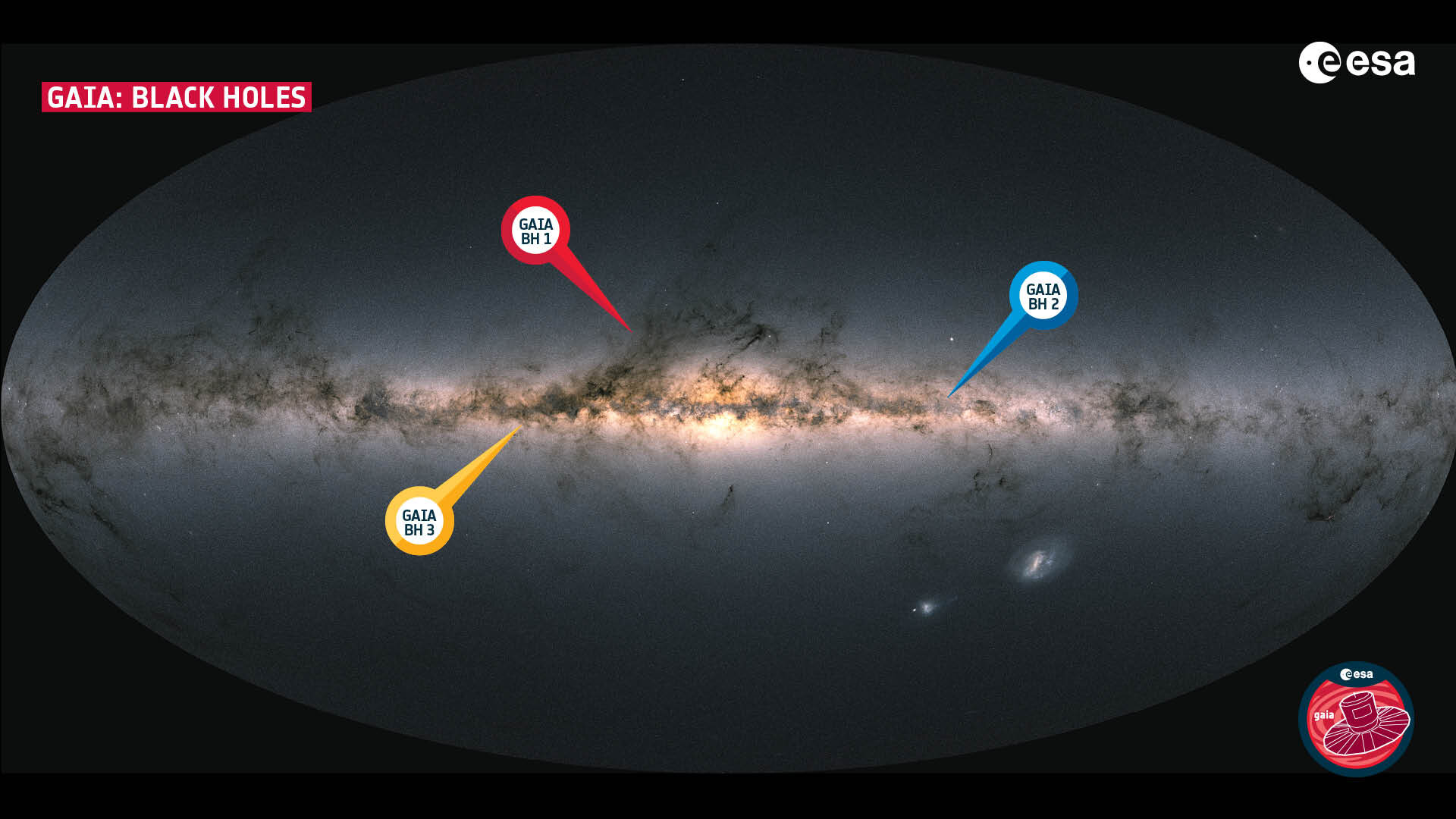
Sleeping giant surprises Gaia scientists

-
StoryScience & Exploration
ESA astronaut graduation: launching into the future

-
StoryScience & Exploration
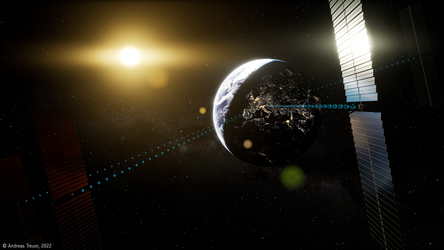
Juice’s first year in space: “it’s real now”

-
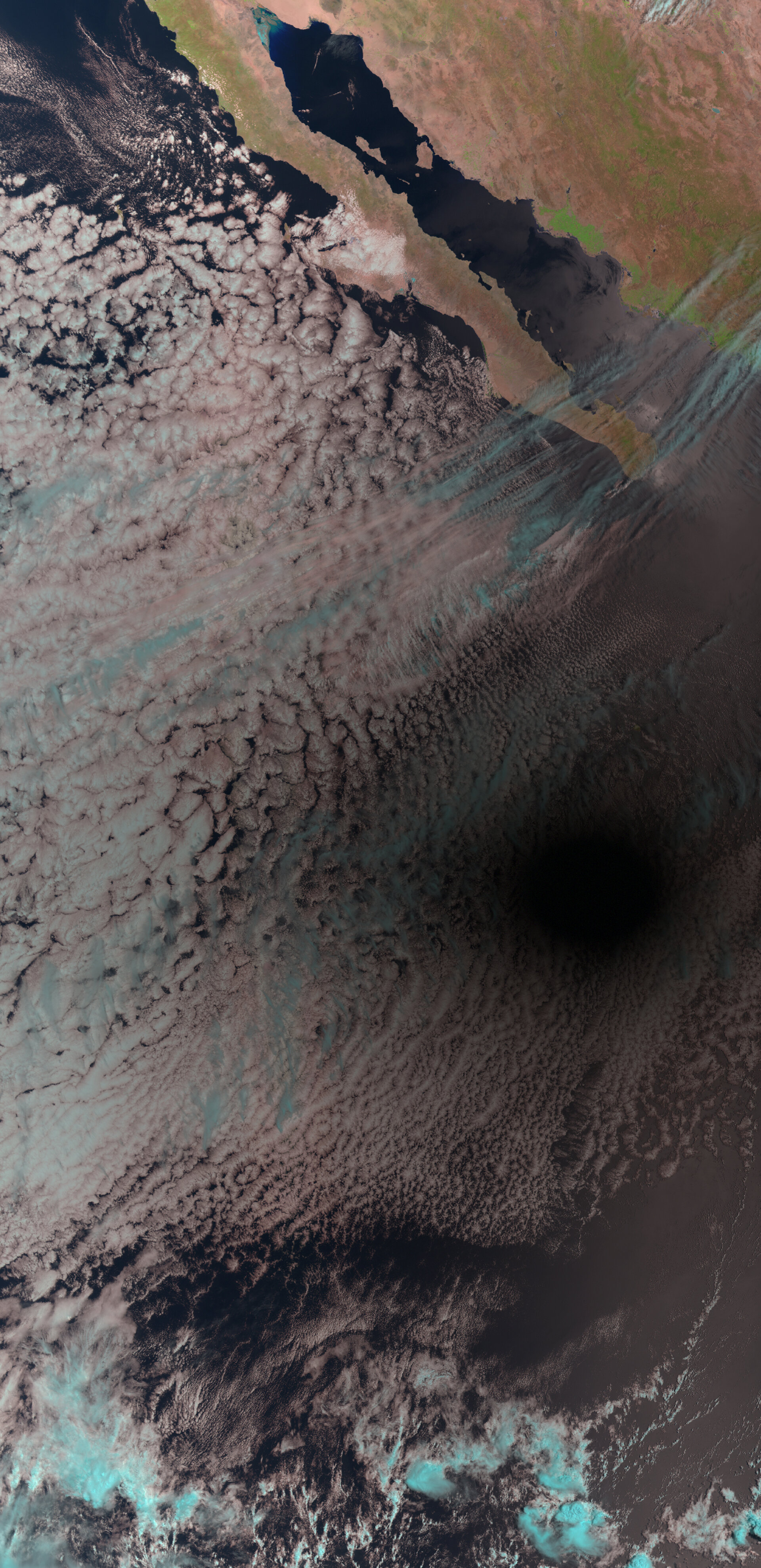
Agency Week in images: 08-12 April 2024
-
StoryAgency
Discover ESA Live: a gateway to ESA’s universe for schools

ESA Programmes
ESA and You
In the spotlight








Image
Science & Exploration
Euclid’s view of the Horsehead Nebula

Recommended





Image
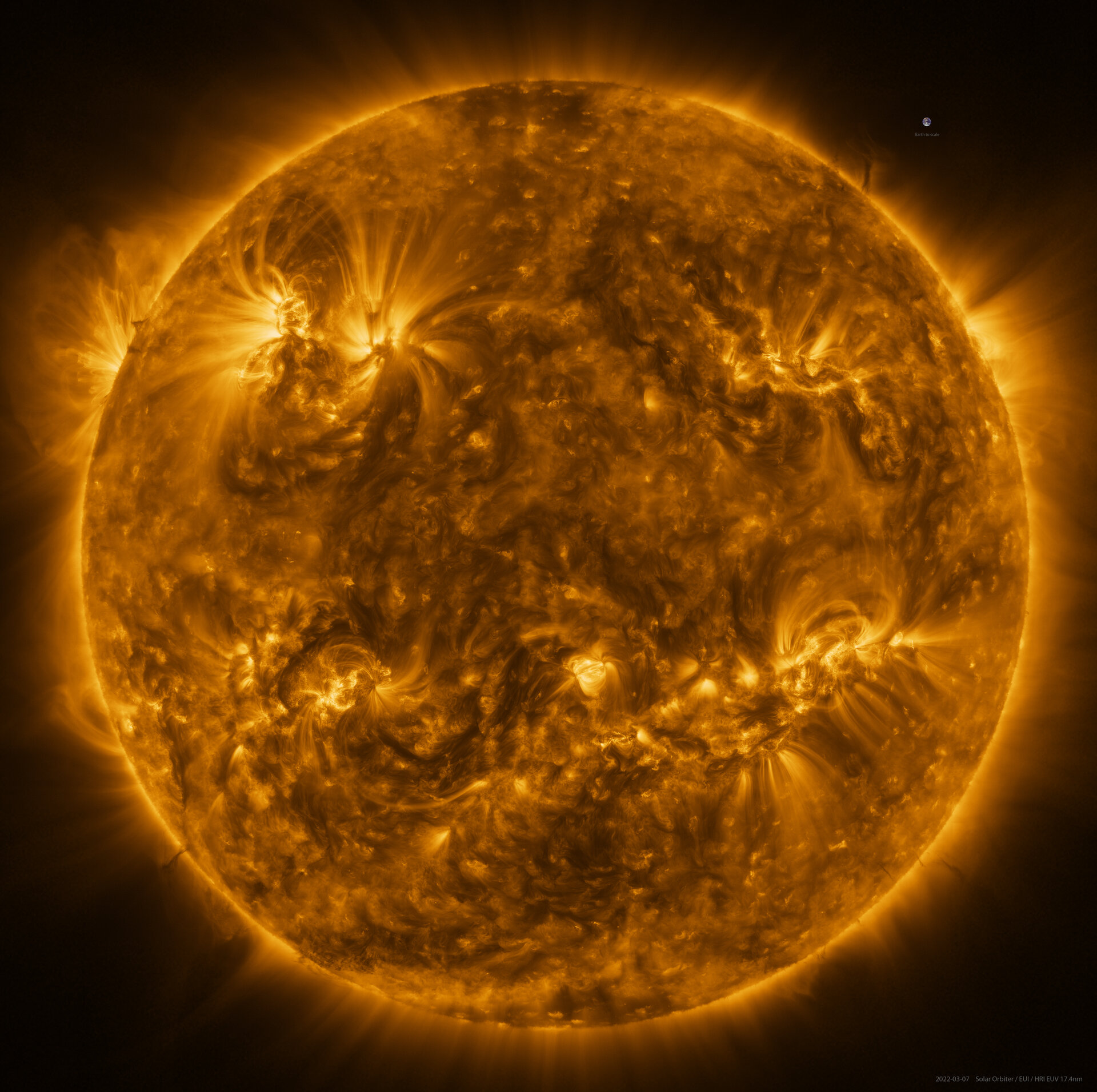
Science & Exploration
The Sun in high resolution