-
StoryScience & Exploration
Watch live: ESA astronaut class of 2022 graduation ceremony


-
Agency Week in images: 15-19 April 2024

-
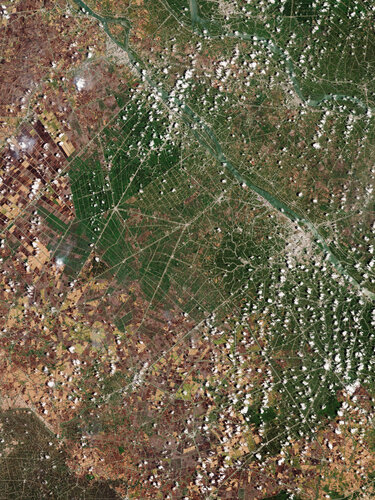
ImageApplications
Dubai floods seen from space

-
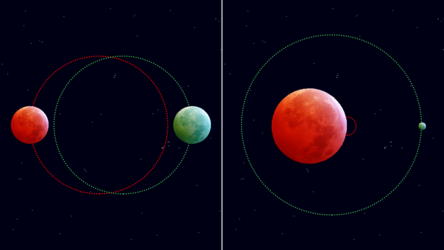
VideoSpace Safety
The Incredible Adventures of the Hera mission – The Missing Puzzle Piece

-
StoryAgency
Discover ESA Live: a gateway to ESA’s universe for schools

ESA Programmes
ESA and You
In the spotlight






Image
Science & Exploration
Euclid’s view of the Horsehead Nebula

Recommended





Image
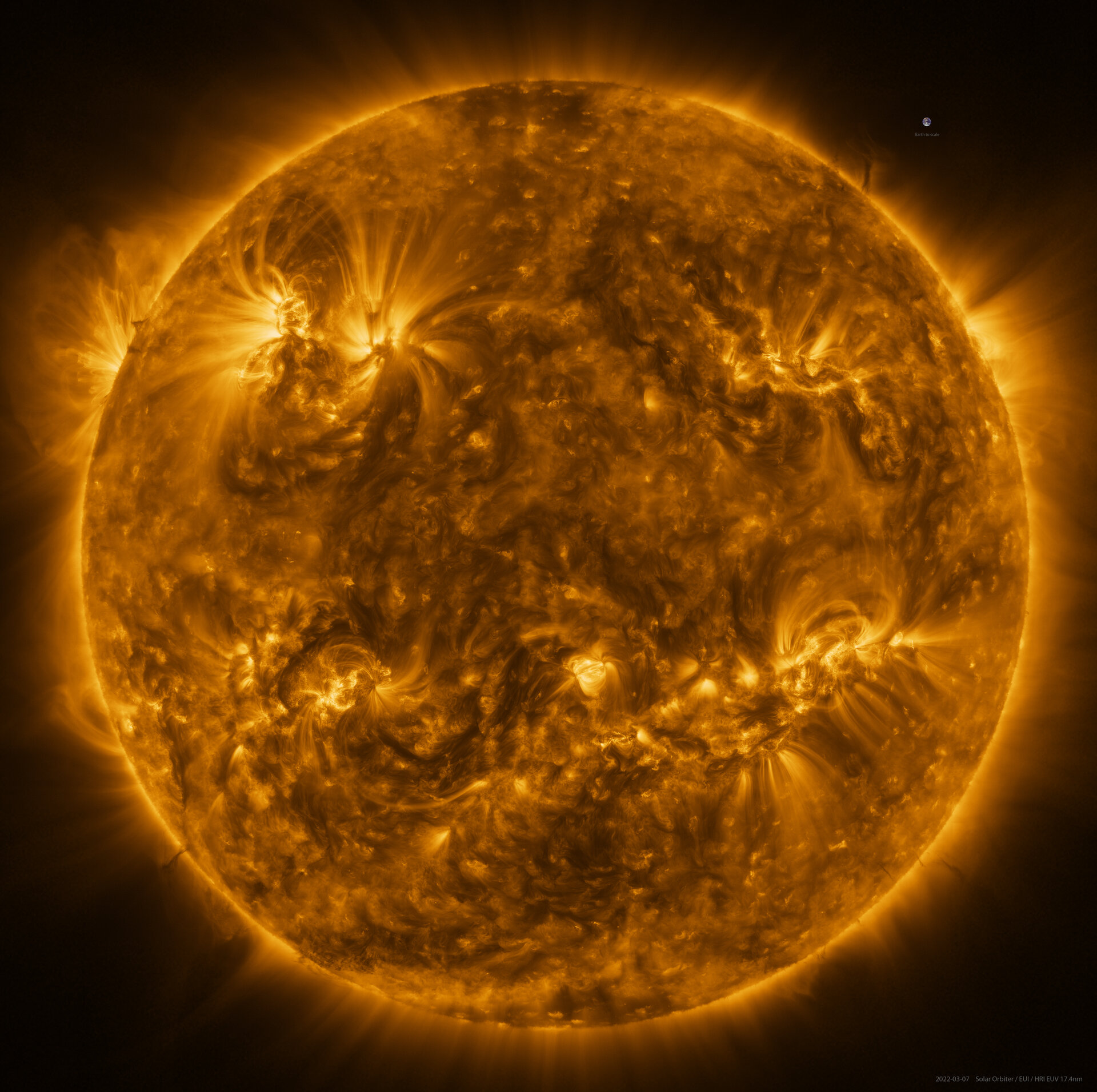
Science & Exploration
The Sun in high resolution