

Kterak ulovit družici
Běžná spojení kosmických lodí jsou už tak dost složitá, ovšem budoucí mise ESA má jít ještě o úroveň výše: má zachytit vysloužilou družici neovladatelně putující na oběžné dráze. Jde o iniciativu v rámci snahy řídit množství kosmického smetí: s průmyslovými partnery jsou přitom nyní diskutovány možnosti vývoje technologií nezbytných pro realizaci tohoto projektu.
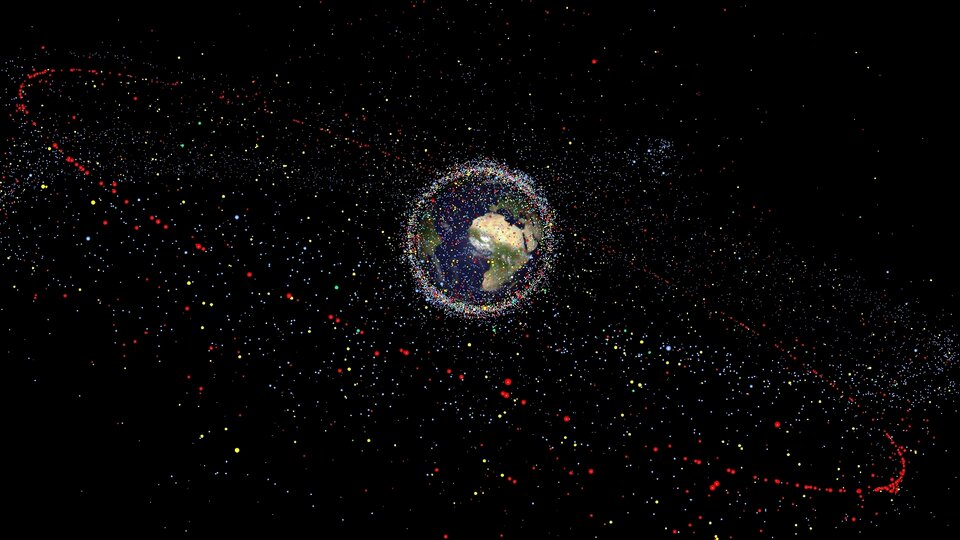
Oblak trosek kolem Země
Iniciativa ESA Clean Space (Čistý vesmír) studuje misi e.DeOrbit pro odstraňování trosek s cílem snížit dopad kosmického průmyslu na Zemi a samotný vesmír.
Desítky let vypouštění kosmických objektů zanechalo kolem Země oblak kosmického smetí: má podobu více než 17 tisíc sledovatelných objektů o velikosti větší, než šálek kávy, které ohrožují aktivní družice katastrofickou kolizí. I objekt o velikosti jednoho centimetru má totiž při srážce sílu ručního granátu.
Jediný způsob, jak řídit množství úlomků kolem klíčových nízkých oběžných drah, je odstraňování rozměrných objektů jako jsou třeba vysloužilé satelity nebo horní stupně nosných raket. Tyto neřízené několikatunové objekty nepředstavují jen riziko kolize, ale zároveň jsou skutečnými časovanými bombami: představují riziko exploze zbytkového paliva v nádržích nebo částečně nabitých baterií ohřátých slunečním zářením.
Výsledná oblaka kosmického smetí dělají z důležitých oběžných drah nebezpečnější prostředí, protože následné srážky mohou spustit řetězovou reakci dalších a dalších rozpadů.
Směrování na klíčové dráhy
Mise e.DeOrbit je určena k odstranění kusů kosmického smetí na hojně využívaných polárních oběžných drahách ve výšce 800 až 1000 km. S hmotností kolem 1600 kg je družice e.DeOrbit navržena k vypuštění na raketě ESA Vega.
Největší technickou výzvou mise je zachycení masivního objektu v nejistém technickém stavu, který navíc může rychle rotovat v různých směrech. Proto budou nezbytné sofistikované zobrazovací senzory a pokročilé autonomní řízení: nejprve pro vyhodnocení stavu vybraného tělesa a následně pro přiblížení k němu.
Přiblížení a následný souběžný let s cílovým tělesem jsou i za normálních podmínek velmi obtížné, ale v případě likvidace kosmického smetí právě teď nastává nejtěžší úkol: jak bezpečně zajistit spojení a následné odeslání kombinace vysloužilé družice plus likvidačního tahače do hustých vrstev atmosféry k řízenému zániku?
Souběžně je studováno použití několika záchytných mechanismů, z nichž bude vybraný nejvhodnější pro minimalizaci rizika mise. Vrhací sítě mají výhodu škálovatelnosti: při dostatečném rozměru mohou zachytit cokoliv bez ohledu na velikost nebo vzdálenost. Chapadla s čelistním mechanismem zase umožňují zachycení k adaptéru pro spojení s raketou u různých družic.
Harpuny zase pracují bez ohledu na polohu a tvar družice – a nevyžadují operace v blízkosti cílového tělesa. Robotické paže jsou další možností: proto budou studovány výsledky budoucí servisní mise DEOS, kterou připravuje německá kosmická agentura DLR.

Další otázky ohledně návrhu platformy jsou požadavky na velké množství pohonných látek nebo na schopnost zachycení rychle rotujícího cíle: jak velká rotace může být eliminována bez toho, aniž by se sama záchytná družice vymkla kontrole.
Kromě možnosti řízené likvidace kosmického smetí pomocí flexibilního a pevného spojení jsou studovány i techniky pro dopravu tělesa na vyšší oběžnou dráhu, a to pomocí tažného kabelu nebo elektrického pohonu.
Studie týkající se mise e.DeOrbit budou probrány na sympóziu, které se uskuteční 6. května v Nizozemí. Zde se setkají zástupci ESA a kosmického průmyslu, aby diskutovali výzkumné možnosti a budoucí plány. Další informace nebo možnost registrace k účasti na sympóziu jsou zde.
