
Přistání „na pětníku“ na Měsíci, Marsu a asteroidech
Nový navigační softwarový systém založený na vizuální navigaci, který je určený pro přistávací automatické meziplanetární sondy, je testovaný v ESA a využívá zmenšený model lunární krajiny. Nyní získal ocenění za výjimečnost, které udělilo francouzské letecko-kosmické středisko ONERA.
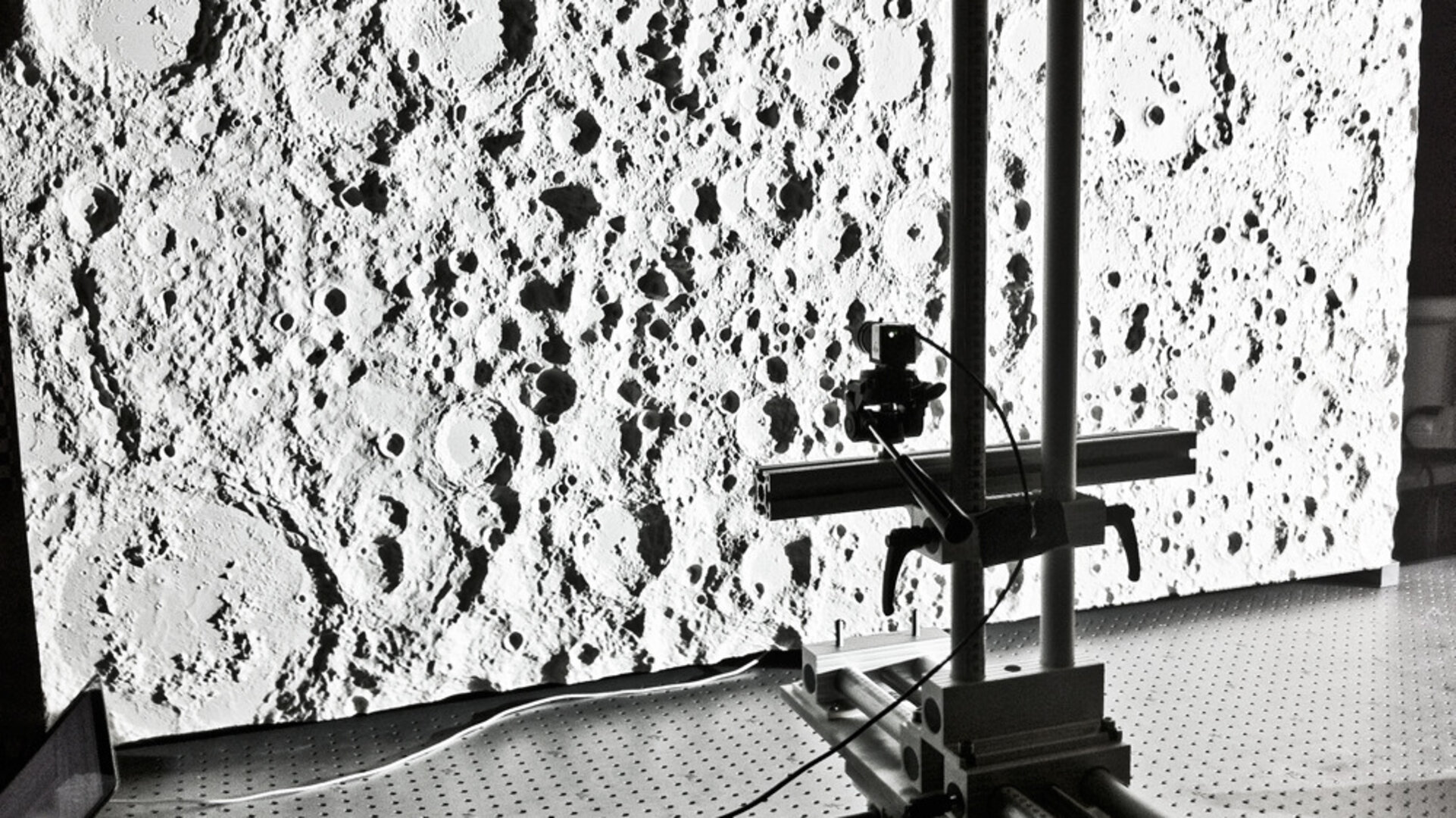
Software pro zajištění přistání je vyhodnocovaný v reálném čase za použití kompaktního zmenšeného modelu lunárního povrchu spojeného s pohyblivou kamerou. Ten se nachází v technickém středisku ESA ESTEC v nizozemském Noordwijku – v laboratoři pro kontrolu zařízení.
Tříletý výzkum doktorandského studenta Jeffa Delaunea byl oceněný francouzským střediskem pro letecko-kosmický výzkum ONERA: za svoji práci byl oceněný jako jeden z šesti nejlepších doktorandů v letošním roce. Jeho doktorandská práce byla spolufinancována jak organizací ONERA, tak francouzskou společností Astrium Space Transportation.
„Cílem mé práce je určit polohu sondy přistávající na jiné planetě. Tedy zastoupit roli, kterou zde na Zemi má systém GPS, ale který není dostupný na Měsíci, Marsu nebo asteroidech,“ vysvětluje Jeff Delaune.

„A toho bychom chtěli dosáhnout s pomocí jednoduché kamery. Neboť to je kus hardware, který je už dnes k dispozici.“
„Pokud jsem turista v Paříži, mohu se rozhlédnout a hledat známé pamětihodnosti jako je Eiffelova věž, Vítězný oblouk nebo katedrála Notre Dame. A s jejich pomocí najdu svoji polohu na mapě.“
„Pokud je stejný proces zopakovaný z vesmíru s dostatkem význačných bodů na povrchu zachycených kamerou, což je oko automatické sondy, můžeme velmi přesně identifikovat dotyčné místo automaticky po porovnání s vizuálními informacemi a mapami, které máme v palubním počítači.“
Tyto informace jsou kritické pro činnost autopilota, aby provedl přesné přistání. Tedy do jednoho sta metrů od cíle. Protože současné mise mají v nejlepším případě odchylku v místě přistání v řádu kilometrů.“
Jednou z největších výzev je „škálovatelnost“: pohled z oběžné dráhy ve vzdálenosti 100 kilometrů se může jevit úplně jinak ve chvíli, kdy se přistávací modul přiblíží povrchu. Stejně tak je obtížné pracovat s proměnlivým profilem terénu.

Systém LION (Landing with Inertial and Optical Navigation) porovnává aktuálně získávané snímky s daty z předchozích misí a s 3D topografickým zobrazením, které se nazývá DEM (Digital Elevation Models). To umožňuje systému poradit si i s proměnami povrchu.
Stejně tak jsou poměřovány rozměry jednotlivých význačných útvarů, aby nedocházelo k záměnám například osamoceného balvanu s vrcholkem hory.
„Všechny potřebné snímky a 3D topografie musí být samozřejmě získány v průběhu předcházející mise,“ dodává Jeff.
„Například sondy NASA LRO (Lunar Reconnaissance Orbiter) získala snímky ve vysokém rozlišení zajímavých oblastí – jako například pólů - na Měsíci. Laserový výškoměr je pak doplnil o detailní topografické mapy.“

When evaluating LION’s navigation accuracy, it turned out that pure software validation based on virtual images was insufficient. Key error contributors to the final navigation performance were associated with the camera properties and the terrain map itself.
“Testing LION with real images of a known planetary surface was an essential step to demonstrate its actual performance and understand the various error contributors,” explains Thomas Voirin of ESA’s Guidance Navigation and Control section, managing this research project from the Agency side.
The testbed includes a high-resolution scale lunar model, built by the DLR German Aerospace Center in Bremen, Germany, a rigid camera support with three axes of freedom, and a Sun-like light source, all mounted on a highly stable optical table.
“With this setup we have been able to demonstrate position accuracy better than 50 m at 3 km altitude at scale on real hardware,” Thomas adds.
Designing this physical testbed was a challenging task in itself. Demonstrating pinpoint landing required the testbed to have an intrinsic positioning accuracy at least ten times better than the expected navigation performance, typically 10 m at lunar scale.

“Our testbed needed to fit in a reduced available space of 2 x 1 m within ESTEC’s Control Hardware Lab, so we had to scale everything down – including the 10 m positioning accuracy requirement,” Thomas explains.
“This scales down to a positioning accuracy of less than a millimetre, which was only achievable in our laboratory with the use of optical correlation of real images of the lunar model with virtually-rendered image of the same scene generated with PANGU software, a specialised ESA planetary scene generation software developed by the University of Dundee.”
Jeff was a trainee in ESA’s former Lunar Lander team, gaining an interest in navigation which inspired his PhD.
He is now working on applying his algorithm to terrestrial vehicles, such as helicopters and quadcopter mini-unmanned aerial vehicles, as well as consumer devices: “All the instruments a interplanetary lander would need are also there on the smartphone in your pocket, so there is also broad terrestrial potential for this space-inspired technology.”
The project is co-sponsored by Astrium Space Transportation of France, ONERA and ESA. It was undertaken through ESA’s Network/Partnering Initative, which supports work carried out by universities and research institutes on advanced technologies with potential space applications, with the aim of fostering increased interaction between ESA, European universities, research institutes and industry.
