

Řízení automatických robotů z oběžné dráhy
Kosmonaut ESA Andreas Mogensen se stal zkušeným „vesmírným řidičem“ poté, co v první polovině září na dálku ovládal dvě vozidla na Zemi přímo z oběžné dráhy. Jako součást projektu Meteron dokonce řídil přímo z Mezinárodní kosmické stanici rover o velikosti osobního vozidla, s jehož pomocí opravil maketu lunární základny nacházející se v Nizozemí.

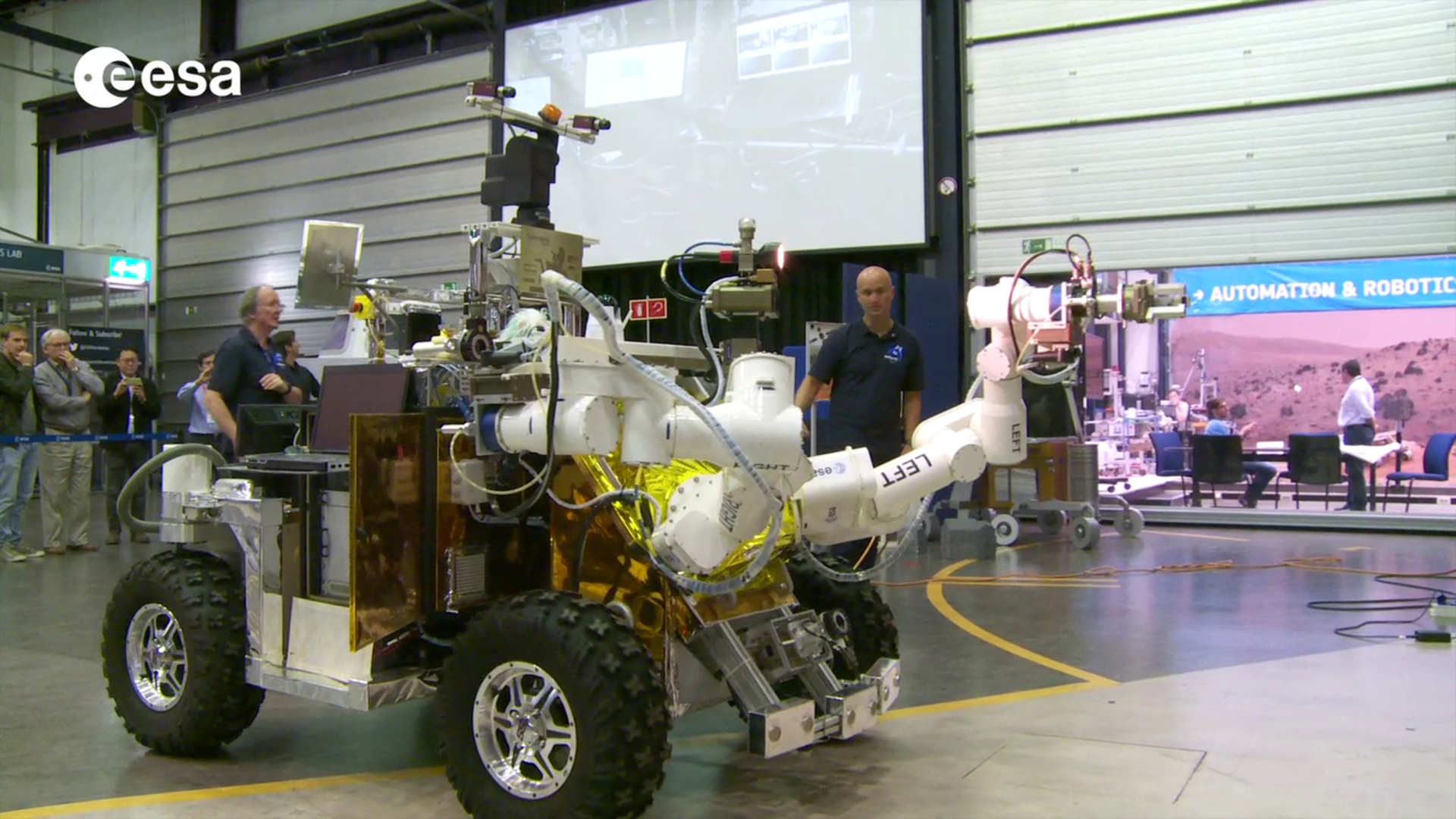
Andreas Mogensen přímo řídil rover Eurobot v simulovaném scénáři, kdy došlo k potížím na Měsíci. Druhý rover byl přitom řízený ze střediska ESA v Německu, což umožnilo kosmonautovi na oběžné dráze zaměřit se výhradně na Eurobota a zasáhnout v případě potřeby.
Nové uživatelské rozhraní pro řízení robotů z vesmíru fungovalo perfektně a i ve velmi stísněném prostředí nemělo problémy. Experiment proběhl nad očekávání dobře, takže byl provedený v rámci jediného běhu – přitom se čekalo, že k jeho kompletaci budou nutné tři běhy v průběhu dvou dní.
„Experiment názorně demonstroval, že máme prostředky na řízení lunárních robotů přímo z lodi obíhající kolem Měsíce. Což je téma, která ESA aktuálně studuje,“ vysvětluje systémová inženýrka projektu Meteron Jessica Grenouilleauová.

Přistání lidí na vzdálených objektech je jedna věc, ale to také znamená, že s sebou potřebují palivo a veškeré vybavení pro návrat na Zemi, jakmile jejich mise skončí. Mnohem ekonomičtější a bezpečnější je tak vyslání průzkumných robotů na místa zamýšlených přistání a jejich předpřipravení před příletem kosmonautů. A pokud jsou roboti navíc kosmonauty přímo ovládáni, ti se mohou adaptovat na situace mnohem lépe, než v rámci simulací.
Meteron vyvíjí komunikační síť, rozhraní a hardware, které umožňuje řídit robota ze vzdálených míst ve vesmíru. Kosmická stanice je přitom v daném případě testovacím prostředím, odkud kosmonauti ovládají roboty na Zemi.
Demonstrační experiment prokázal, že roboti mohou vykonávat užitečnou činnost a že dva mohou spolupracovat efektivně navzdory faktu, že každý je ovládaný z jiné vzdálené lokality.
Experiment prokázal, že uživatelské rozhraní funguje výborně a že „kosmický internet“ ESA může přenášet živé videosignály na stanici bez významných prodlev a omezení kvality. Připomínáme, že ISS obíhá Zemi rychlostí 28800 km/h ve výšce zhruba 400 km.
Pokud je spojení na okamžik přerušeno, což se v případě kosmických operací stává poměrně často, síť se s tímto výpadkem dokázala velmi rychle vypořádat.

Uživatelské rozhraní bylo vyvinuto pro ESA týmem z firmy Thales Alenia Space v Itálii, který se musel vypořádat s napjatými termíny, aby se vše stihlo do startu Andrease Mogensena.
Aktuální experiment byl třetím a zatím nejkomplexnějším krokem v rámci programu Meteron. V pondělí 7. září Andreas Mogensen dokázal přivést dálkově ovládané vozidlo, aby zastrčilo konektor do těsného otvoru.
„Po dvou velmi úspěšných operacích s dálkově ovládanými roboty na Zemi řízenými z vesmíru během dvou po sobě jdoucích dnů, se už nyní těšíme na další projekty, které upevní evropské vedení na poli spolupráce člověka a robotů,“ uzavírá projektový koordinátor Meteronu Philippe Schoonejans.