
Simulované selhání roveru na Marsu představovalo test spolupráce kosmonautů s elektronickými pomocníky
Potíže s vozidlem vždy představují nepříjemnost – zvláště pak na Rudé planetě. Skutečné robotické vozidlo přitom muselo čelit problémům s kolem během simulované mise na Mars. Cílem této uměle vytvořené situace bylo vyzkoumat, jak moc jsou nově vyvinutí „elektroničtí pomocníci“ schopni pomáhat kosmonautům.
„Velké vzdálenosti a z nich vyplývající prodleva v rádiové komunikaci, která jsou spojené s misemi do hlubin vesmíru. Díky tomu není možná stejně pohodlná komunikace s řídicím střediskem jako v případě letu kosmonautů na oběžné dráze Země, vysvětluje Mikael Wolff, který v ESA dohlíží na projekt MECA-Heart (Mission Execution Crew Assistant – Human E-partner Agent Robot Teaming).
„Namísto toho potřebujeme najít způsoby, jak znalostmi a podporou přímo podpořit posádku. Ta totiž musí přijmout rychlá rozhodnutí ve chvíli, kdy se objeví neočekávané problémy v časovém presu – a v nepřátelském prostředí.“
„Přístup, na kterém pracujeme, zahrnuje inteligentní elektronické pomocníky nazvané ePartners. Ti mohou zajišťovat podporu posádce nejen shromážděním všech potřebných informací, ale zároveň docházet k závěrům na vyšší úrovni. Aktivně tak mohou podporovat rozhodovací procesy.“
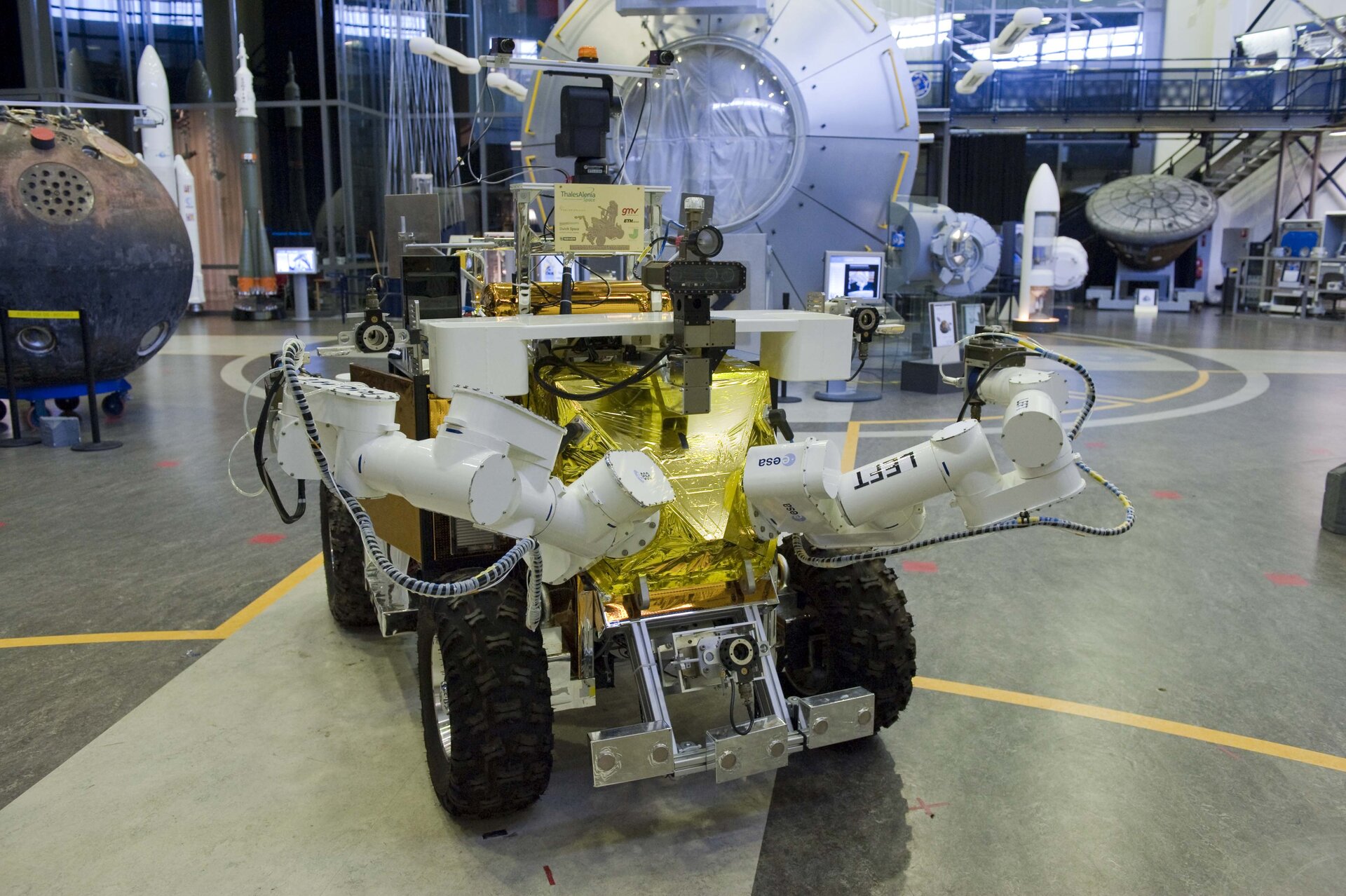
Během dvou dnů proběhly ve středisku pilotovaných letů Erasmus (nachází se v centru ESA ESTEC v nizozemském Noordwijku) čtyři testovací běhy. V jejich průběhu hrál mobilní robot EGP (Eurobot Ground Prototype) roli roveru na Marsu.
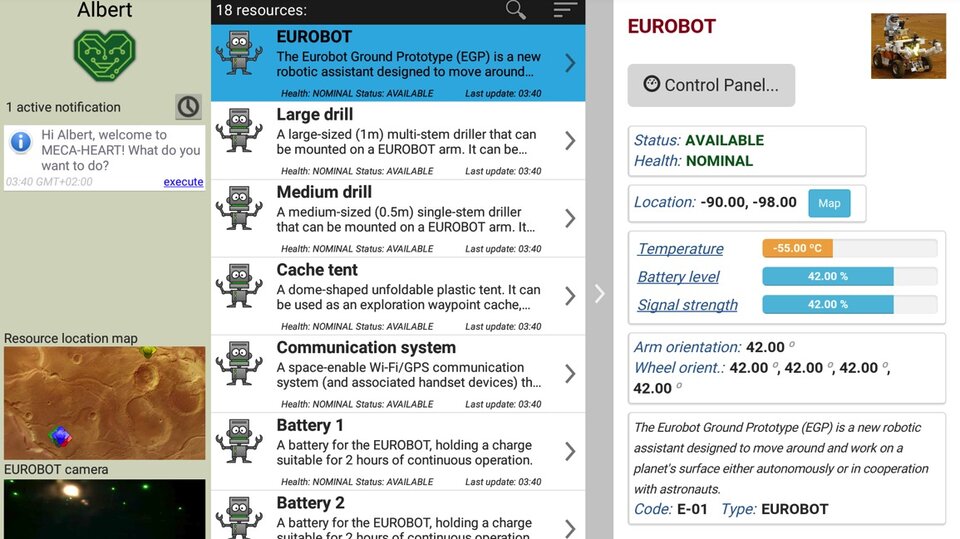
Účastníci testu se pak do projektu zapojili i v roli kosmonauta-řidiče, který byl označovaný jako Albert. Ten pracoval společně s velitelem mise z obytného modulu nazvaného Hannah. Do testů se zapojil i skutečný kosmonaut ESA: Léopold Eyharts, který se může pochlubit výlety na stanice Mir a ISS.
Simulovaný úkol představoval vztyčení dočasného stanu pro uložení vybavení, a to v určité vzdálenosti od obytného modulu. Skutečné testování pak začalo po přesně simulované chybě. Jedno z kol vozidla se přestalo volně otáčet, což před posádku postavilo dilema.

Zaseknuté kolo totiž znamená vyšší odběr proudu z palubních akumulátorů. Takže je otázkou, jak se má řidič rozhodnout? Pokračovat v jízdě a počítat s využitím rezervního akumulátoru, pokusit se opravit kolo nebo změnit plán a přesunout tábor blíže k obytnému modulu, ovšem na úkor jeho užitečnosti?
V tu chvíli začali aktivně spolupracovat „inteligentní pomocníci“, kteří bleskově získali přístup k plánu mise a souvisejícím datům, specializovaný software na tabletu ePartners varoval, že původní plán mise je v ohrožení – a ihned nabídl různé alternativy s upozorněním na aktivity, které se dostaly do ohrožení.
