
De Winne werkt met robotarm van ruimtestation
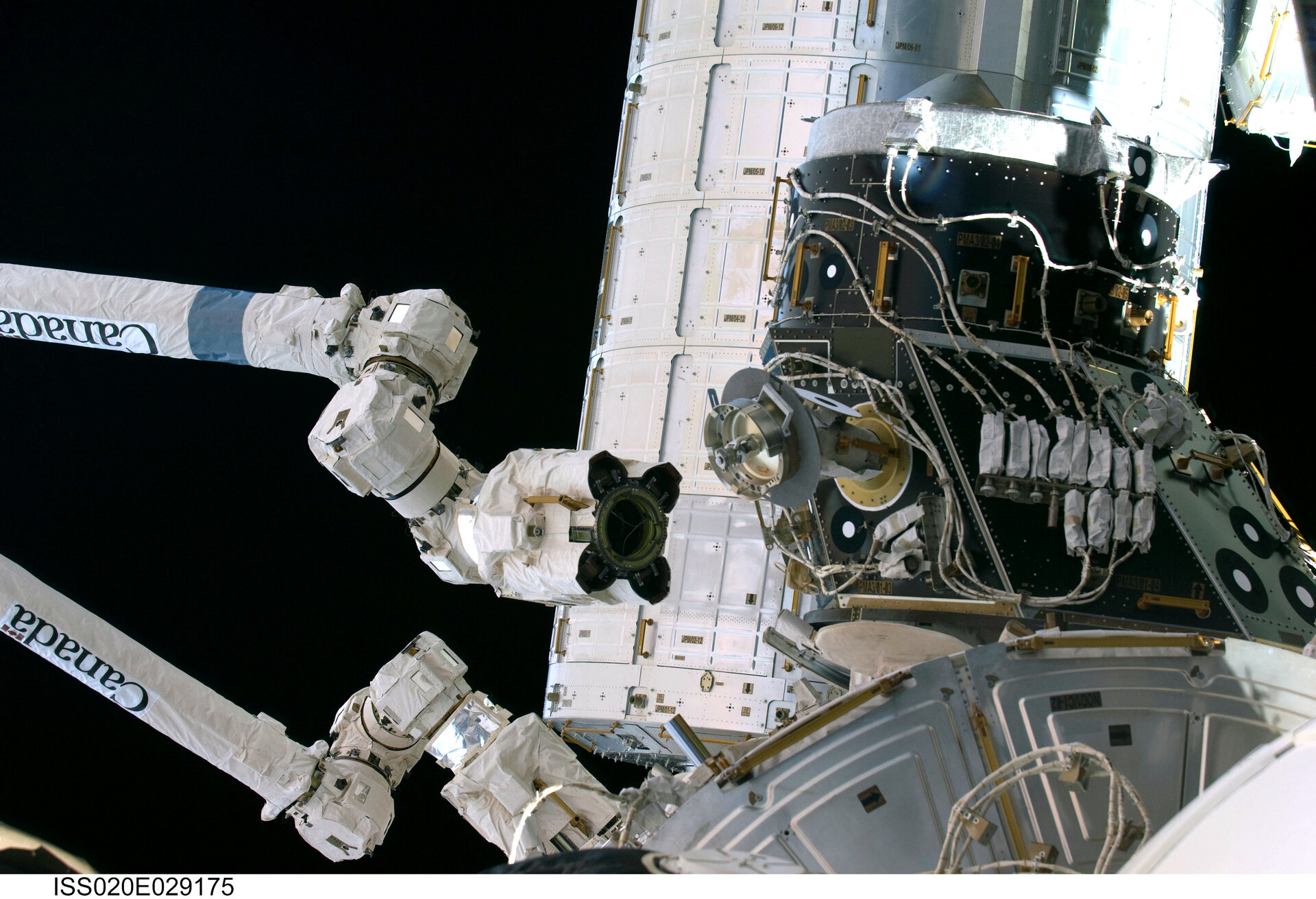
Afgelopen vrijdag gebruikte Frank De Winne de robotarm van het internationaal ruimtestation ISS om een koppelelement aan de buitenkant van de module Unity te verplaatsen.
De Pressurized Mating Adapter 3 (PMA 3) moest plaats ruimen voor de komst van de module Tranquility (alias Node 3) met de observatieruimte Cupola begin volgend jaar.
Samen met zijn gezel Robert (Bob) Thirsk van ISS-expeditie 20 en in nauwe samenwerking met de vluchtleiding op de grond bediende De Winne de 18 meter lange robotarm vanuit het ISS.
Het hele gebeuren nam ongeveer zes en een half uur in beslag. Daarbij werd de PMA 3-adapter verplaatst vanaf de naar de aarde toegekeerde koppelkraag (nadirzijde) van de module Unity naar de bakboordzijde. Daarbij werd de robotarm van het station, de zogenaamde Canadarm2, gebruikt.
De PMA 3 is één van drie kegelvormige adapters voor het aankoppelen van ruimteschepen met het ISS. Ze worden gebruikt om ruimtetuigen en ISS-modules aan elkaar vast te maken, die geen met elkaar compatibele koppelmechanismen hebben. Het verplaatsen van PMA 3 was nodig om plaats te maken voor de in Europa gebouwde module Node 3, onlangs door de NASA Tranquility genaamd, en de observatiemodule Cupola in 2010.

De operaties met de robotarm gebeurden in nauwe samenspraak tussen de astronauten in de ruimte en de vluchtcontrole in het Johnson Space Center van de NASA in Houston en het hoofdkantoor van het Canadian Space Agency (CSA) in St. Hubert, Canada.
De Winne en Thirsk gingen in het ruimtestation even voor 11.00 uur Belgische tijd van start. Met de robotarm van het station grepen ze de PMA 3 vast en maakten hem los van de nadirpoort van Unity.
Commando's van op de grond manoevreerden de Canadarm2 vervolgens naar de nieuwe locatie aan de linkerzijde van Unity. Daarna namen De Winne en Thirsk de controle over de robotarm weer over en verankerden de PMA 3 op zijn locatie. Rond 17.30 uur Belgische tijd was de opdracht eerder dan gepland achter de rug. Volgens De Winne was het een opwindende dag geweest. 'Eindelijk kon ik ook echt met de robotarm werken', zei hij.
'De opdracht was niet heel erg uitdagend, maar met robotica moet je altijd heel geconcentreerd zijn en uiterst nauwkeurig en aandachtig werken, zodat je niet de minste fout maakt.'

'Het verliep allemaal heel goed, bijna zoals tijdens de training en zelfs beter. De arm beweegt heel stabiel en is beter met de handcontrole te bedienen dan in de simulators., voegde hij eraan toe.
'Het was ook een enorm genoegen om samen met Bob te werken. We waren beiden heel geconcentreerd en heel kalm. Maar we werkten ook in een zeker tempo zodat we voorop bleven op het tijdschema.'
De Winne is goed opgeleid om zowel met de Canadarm2 te werken, als met de Japanse robotarm. Later in de missie zal hij de Japanse arm gebruiken om externe apparatuur te verplaatsen van het Japanse H-II Transfer Vehicle (HTV), waarvan de lancering naar het ISS in september is voorzien.


