
ESA-astronaut André Kuipers test Europese robotarm onder water
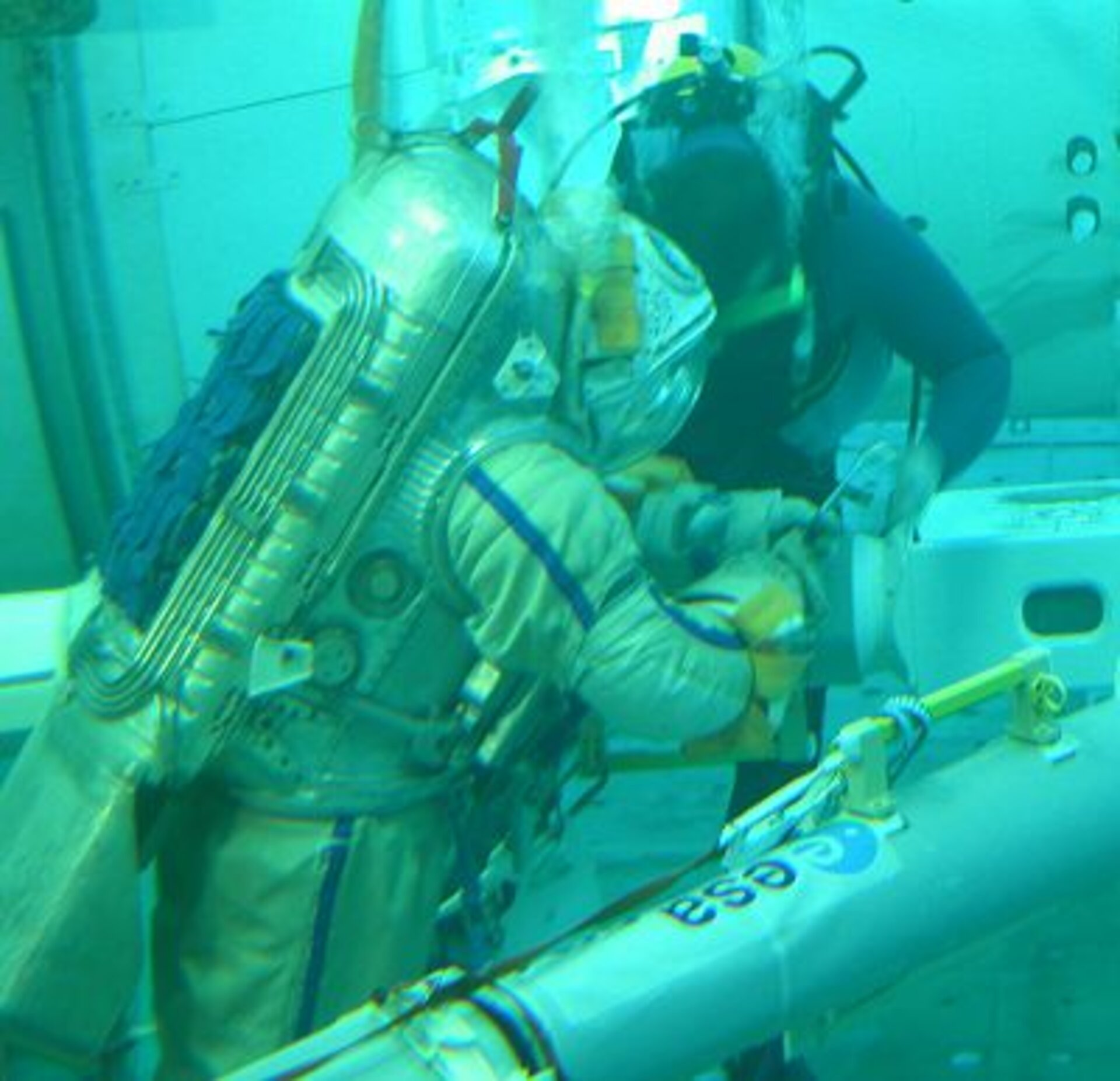
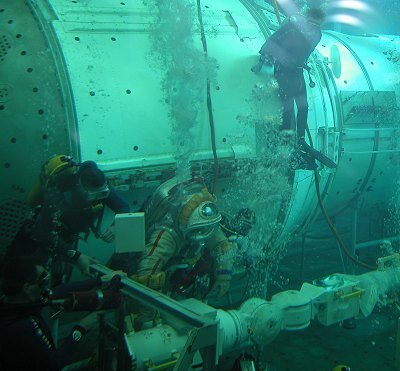
Het onderwater model van de Europese robotarm ERA is vorige week uitvoerig geïnspecteerd en getest in het Gagarin kosmonautenopleidingscentrum bij Moskou. ESA-astronaut André Kuipers kroop voor de gelegenheid in een Russisch Orlan ruimtepak.
Ruim drie uur werkte hij onder water met de robotarm, die gebouwd werd in 1998, maar desondanks in uitstekende conditie verkeert. De echte ERA wordt in november 2007 gelanceerd samen met de Russische ISS Multipurpose Laboratory Module (MLM).
Indrukwekkend
De indrukwekkende robotarm meet ruim elf meter in lengte en is 630 kilo zwaar. Eenmaal in de ruimte heeft ERA de Russische laboratoriummodule MLM als thuisbasis, maar met behulp van zeven gewrichten, een variatie aan gereedschappen en de nodige elektronica, kan de astronautenhulp zich als een insect over de Russische segmenten bewegen en verschillende werkzaamheden verrichten.

ERA-projectmanager Philippe Schoonejans: ‘ERA kan met de Russische luchtsluis werken, waardoor astronauten voor de installatie van sommige hardware niet meer naar buiten hoeven. Hij kan inspecties aan de buitenkant van het ruimtestation uitvoeren met videocamera’s, experimenten en voorraden verplaatsen en zelfs dienen als hoogwerker voor astronauten.’
Kuipers testte het Weightless Environmentel Test exemplaar van de ERA, kortweg: het WET-model. Dit model werd in 1998 gebouwd door een consortium van bedrijven onder leiding van het Nederlandse Dutch Space (voorheen Fokker Space). Aanvankelijk zou ERA in 2001 met de Space Shuttle gelanceerd worden, maar dat ging om verschillende redenen niet door. Afgelopen zomer werd besloten om de robotarm in 2007 samen met de MLM per Russische Proton-raket naar het internationale ruimtestation te vervoeren.
Zware klus

Zover is het nog niet. Vorige week werd het WET-model onder leiding van Kuipers onder water gedemonteerd en weer in elkaar gezet. Ook liep de Nederlander samen met de Rus Dmitry Verba de handmatige besturing na, die dient als reserve voor het automatische systeem. ‘Het was een zware oefening die veel geduld vergde’, aldus de Nederlandse astronaut. ‘We moesten veel draaibewegingen maken voor de manuele bediening. Onder water is dat een hele klus.’
De arm functioneerde goed. Toch zijn er een aantal verbeterpunten, constateerde Schoonejans. Sommige ‘one-hand operations’ moesten door Kuipers met twee handen, of met behulp van Verba worden uitgevoerd, omdat er te weinig houvast was voor de astronaut. Dit kan mogelijk worden opgelost met een mobiel bevestigingsmechanisme. Ook wordt een serie dopsleutels aangepast, omdat die bij het aandraaien van bouten steeds loslieten, wat leidde tot veel tijdverlies. En het isolatiemateriaal wordt steviger bevestigd, want dit verstoorde soms het zicht van de videocamera’s.
Perfectioneren
Zowel het Russische bedrijf Energia, als de Europese partners die aan ERA bouwden, gaan de robotarm het komende jaar perfectioneren. Als vervolgens ook de nieuwe procedures klaar zijn, wordt halverwege 2006 voor het eerst met de definitieve ERA getraind door toekomstige bemanningen van het ruimtestation. Zij zullen de robotarm tot zijn uiterste kunnen beproeven, voordat hij in 2007 wordt gelanceerd.
Lees ook een interview met André Kuipers:
'Ruimtewandeling is net werken in een opgeblazen ballon'

