
Controlando un robot desde la Estación Espacial
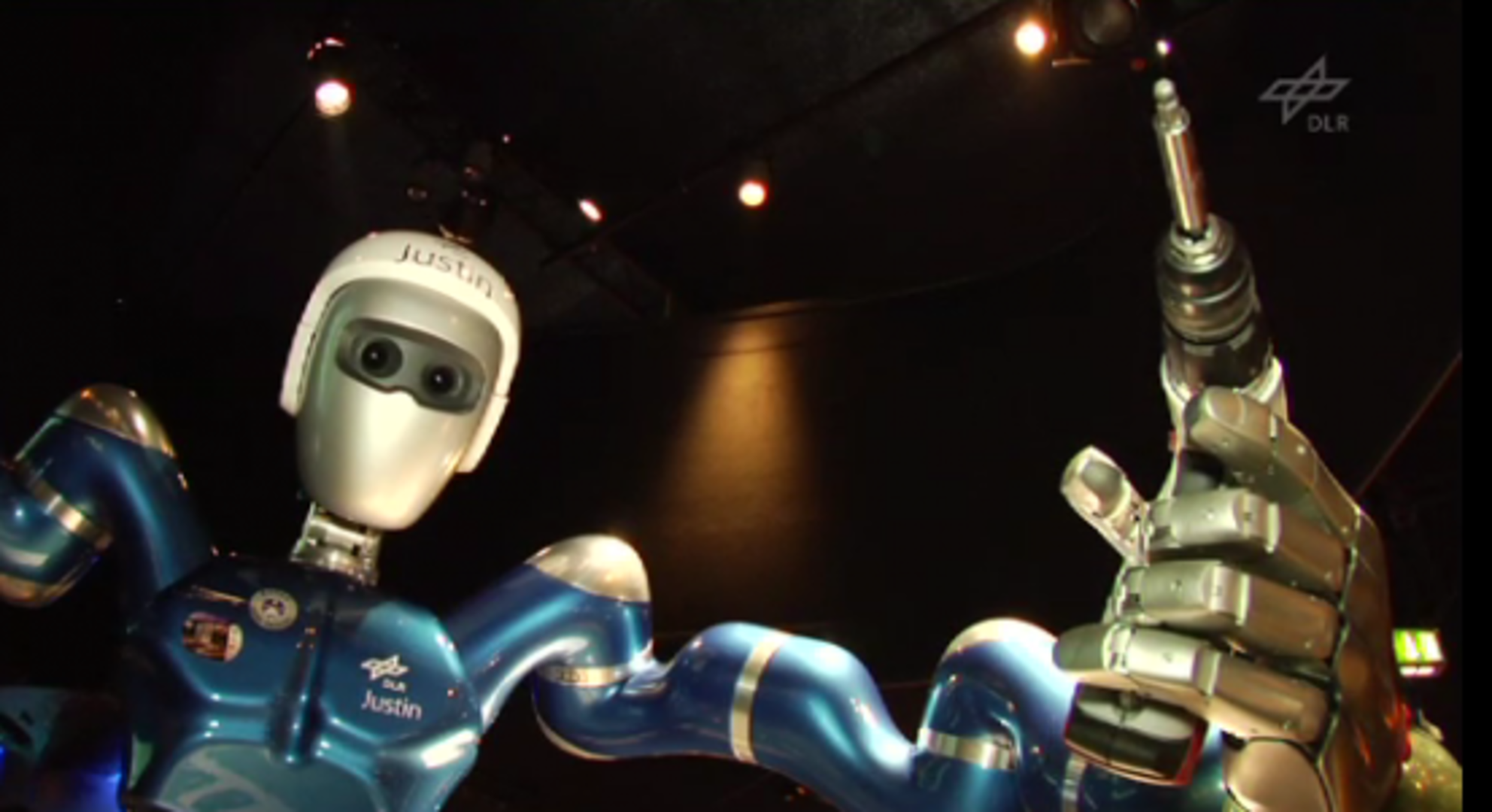
Te presentamos a Justin, un androide que dentro de poco podrá ser controlado a distancia por los astronautas a bordo de la Estación Espacial Internacional. Con este y otros fascinantes proyectos, la ESA prepara el camino para explorar la Luna y los planetas con robots teledirigidos.
Dentro de dos o tres años, un robot en tierra será capaz de reproducir con detalle los movimientos de un astronauta en la Estación Espacial Internacional (ISS).

Los astronautas utilizarán un exoesqueleto – una estructura que recubre los brazos y las manos, repleta de sensores y de actuadores electrónicos – para trabajar a distancia con la misma precisión que tendrían si estuviesen físicamente allí.
Para poder transformar la robótica y las técnicas de tele-presencia en una herramienta estándar de las futuras misiones espaciales, la ESA está preparando un enlace entre tierra y la Estación Espacial Internacional que permitirá controlar experimentos robóticos desde el complejo orbital.

Esta iniciativa, bautizada como Meteron (acrónimo inglés de Red Punta a Punta Multiuso para Operaciones Robóticas), permitirá probar las tecnologías necesarias para las futuras misiones de exploración de la Luna, Marte u otros cuerpos del Sistema Solar.
“La Estación Espacial Internacional es la plataforma perfecta para simular con gran realismo los futuros escenarios de exploración tripulada”, comenta Kim Nergaard, Coordinador de Meteron para la ESA.
“En primer lugar tenemos que establecer una arquitectura de comunicación robusta, implementar un sistema de operaciones y definir un protocolo que permita a los astronautas, a los robots y a nuestro centro de control trabajar juntos de forma efectiva. Esto no es tan fácil como parece”.
Con muchas ideas sobre la mesa

A principios de este año, la ESA solicitó propuestas sobre cómo utilizar la Estación Espacial Internacional como banco de pruebas para las futuras misiones de exploración tripulada. Un buen número de las ideas recibidas proponía controlar robots en tierra desde una consola en el laboratorio Columbus de la ESA en la Estación Espacial.
“La cantidad de propuestas que sugerían este concepto demuestra la fortaleza de la idea”, explica Philippe Schoonejans, Director de la División de Robótica del Directorado de Vuelos Tripulados y de Exploración de la ESA.
“Esta iniciativa nos permite tener en cuenta todas las propuestas recibidas y crear nuevas oportunidades para los países, empresas e institutos de investigación que han mostrado su interés en participar”
“Meteron es una propuesta viable a corto plazo, ya que utiliza la infraestructura y la tecnología ya existentes y no requiere una fuerte inversión adicional”, explica François Bosquillon de Frescheville, responsable de los estudios conceptuales de las operaciones de las futuras misiones tripuladas de exploración, impulsor de esta iniciativa.
Primero un rover, luego un androide

En la primera fase de Meteron, los astronautas de la Estación Espacial controlarán a distancia el prototipo del rover Eurobot de la ESA desde un ordenador equipado con un joystick y unos monitores especiales.
Este prototipo es un rover de cuatro ruedas y dos brazos, que cuenta con un avanzado sistema de navegación, cámaras y sensores, que se está probando desde el año 2008 en el Centro Europeo de Investigación y Tecnología Espacial (ESTEC) de la ESA en los Países Bajos.

En la siguiente fase, los astronautas podrán manejar un robot dotado de ‘tacto’ y sensores de fuerza. Con este sistema, se podrán controlar androides como Justin, desarrollado por el Centro Aeroespacial Alemán (DLR).
“Gracias a estos sensores, los astronautas podrán sentir la fuerza real que está ejerciendo el robot en su entorno de trabajo”, explica André Schiele, responsable del Laboratorio de Tele-robótica y Háptica de la ESA.

“Esto será especialmente útil para desplazar rocas, o para desarrollar tareas complejas como el ensamblaje de equipos”
Sea cual sea el camino que seguirá la exploración de la Luna y de Marte, necesitará técnicas de comunicación avanzadas y herramientas sofisticadas. Gracias al gran avance de las interfaces humano-máquina, los astronautas en órbita podrán trabajar con robots para explorar la superficie de los planetas.


