

El Desafío de Robots Lunares de la ESA fue un duro reto para los equipos de estudiantes
El volcán del Teide en la isla de Tenerife se convirtió la semana pasada en una réplica de la Luna, donde ocho equipos de estudiantes de universidades europeas estuvieron poniendo a punto, probando y maniobrando sus rovers lunares en preparación para la competición que se celebró durante las oscuras noches del pasado fin de semana.
Maniobrar un rover en la Luna no es tarea fácil. Los robots de exploración tienen que desplazarse por un terreno agreste y con grandes pendientes, cubiertos por una costra de polvo en el vacío de la atmósfera lunar. El Sol calienta a los rovers hasta unos 110ºC y, en cuanto se adentran en la sombra, la temperatura puede caer hasta los -100ºC, o incluso menos en las regiones polares.
El Desafío de Robots Lunares de la ESA para equipos de estudiantes universitarios hace más sencilla esta tarea ya que las condiciones en el volcán del Teide, a una altitud de 2000 metros, son mucho más confortables para los rovers y sus conductores. El terreno sigue siendo agreste, comparable al de los polos de la Luna, y es un auténtico reto poder maniobrar un vehículo robótico en la oscuridad con la única ayuda de cámaras y sensores.
Las condiciones meteorológicas llevaron a los equipos de estudiantes al límite – un clima que no es nada común en la Luna, con nubes y lluvia – pero también tuvieron problemas técnicos. Finalmente uno de los ocho equipos, el de la Universidad de Bremen, consiguió completar con éxito la misión y otros dos equipos estuvieron muy cerca de lograrlo.

Ahora empieza un nuevo reto para Gianfranco Visentin, responsable del Laboratorio de Automática y Robótica en el Centro Europeo de Investigación y Tecnología Espacial (ESTEC), que es uno de los promotores del desafío y coordinador del jurado. “Necesitamos más tiempo para tener en cuenta los puntos y penalizaciones de cada equipo, porque las condiciones meteorológicas nos forzaron a cambiar la programación del evento y los resultados no son directamente comparables”, comenta Visentin.
“El evento resultó ser un auténtico desafío y una verdadera competición entre los equipos, justo lo que queríamos. Fuimos hasta el volcán del Teide buscando condiciones adversas, ¡y es justo lo que encontramos!”
“Estoy muy satisfecho de ver el entusiasmo que han puesto los estudiantes en este desafío”, continúa Visentin, “Estábamos buscando una gran variedad de soluciones técnicas y una competición real entre ellas. Algunos equipos tienen una amplia experiencia en actividades robóticas en exteriores, y nada más llegar se pusieron a hacer cosas. En el otro extremo hay equipos que nunca habían hecho nada similar y para ellos esta es una oportunidad única para probar sus sistemas tremendamente complejos en un entorno real. Este desafío es un gran paso para ellos y subieron rápidamente por la curva de aprendizaje.”
Un Desafío para los estudiantes

El primer Desafío de Robots Lunares de la ESA se anunció a finales de Marzo, invitando a los estudiantes universitarios de Europa a crear un robot móvil e innovador capaz de tomar muestras de un cráter similar a los de la Luna. Los vehículos debían pesar menos de 100 kg, consumir menos de 2 kW de potencia, y ocupar un volumen inferior a 0.5 metros cúbicos con los apéndices desplegables guardados.
La misión del robot se diseñó para simular una misión real de retorno de muestras de la Luna. El rover tenía que ser capaz de moverse desde el “lugar de alunizaje” hasta el borde de un cráter similar a los de la Luna, descender hasta el fondo de un cráter de 15 m de profundidad, localizar y recuperar al menos 0.1 kg de muestras del suelo seleccionadas y distinguibles visualmente y volver al “lugar de alunizaje”. Al descender y volver a trepar las paredes del cráter, el rover tenía que desplazarse por pendientes de hasta 40 grados de inclinación.
Los rovers tenían que ser controlados de forma remota desde una estación situada fuera del cráter en un lugar desde el que no hay visibilidad directa del cráter o su borde. Además, todo esto se tenía que hacer en la más absoluta oscuridad.
De entre todas las solicitudes recibidas, se seleccionaron ocho equipos de estudiantes para que diseñasen sus sistemas robóticos. Los equipos presentaron sus diseños en una Revisión Crítica de Diseño (CDR) en Julio, tras la que comenzaron a construir sus robots para competir en el Desafío. Finalmente, tuvieron que superar una Revisión de Preparación para Ensayos (Test Readiness Review, TRR) en las instalaciones de la universidad de cada equipo una vez que terminaron la construcción del dispositivo. Todo el trabajo estuvo apoyado con financiación del Programa de Estudios Generales (GSP) de la ESA.
Ocho equipos diferentes

El Desafío terminó la semana pasada, cuando los ocho equipos se reunieron en Tenerife. Se preparó un campamento especial con las caravanas y furgonetas en la zona del parque nacional de las Cañadas del Teide, cerca del terreno de entrenamientos y de la zona de la Competición final.
El equipo español de la Universidad Politécnica de Madrid presentó su “Sabueso Lunar”, un robot con cuatro grandes ruedas. “Está diseñado para ser lo más simple posible y por lo tanto muy sencillo de controlar”, comenta Claudio Rossi, coordinador del equipo español. Al igual que los otros equipos, los españoles tuvieron que luchar con un programa muy apretado y variedad de problemas de diseño. El sabueso robótico español parecía, cuando aceleraba sobre el terreno, un par de toneles rodando con una pértiga para la cámara y en el medio un brazo para tomar muestras.
Dos de los equipos venían de Alemania. El equipo de la Universidad de Bremen llegó con un dispositivo de tres ruedas muy ligero llamado CESAR (Robot de Exploración de Cráteres y Retorno de Muestras, en sus siglas en Inglés). Además del rover en sí, el sistema incluía un repetidor que debía ser soltado en el borde del cráter para transmitir video y servir de enlace de comunicaciones entre el rover y la estación base. El equipo de la Universidad Jacobs, también de Bremen, presentó dos pequeños robots similares a un tanque. Uno de ellos hacía de repetidor para las comunicaciones mientras que el otro estaba diseñado para descender dentro del cráter.
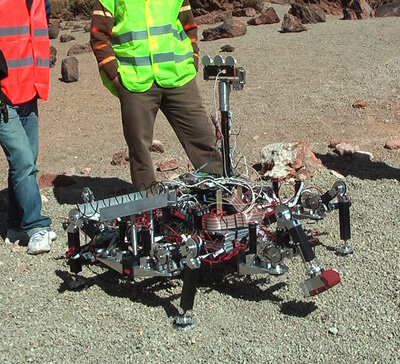
También participaron dos equipos de Italia. El equipo de la Universidad de Pisa desarrolló un robot de seis ruedas del tamaño de un carrito pequeño de la compra. La Scuola Superiore Sant’Anna de Pisa presentó un robot muy avanzado tecnológicamente, “pESApod”, con forma de araña.
El equipo suizo del Instituto Federal de Tecnología (Eidgenössische Technische Hochschule, ETH) de Zurich construyó un sistema de tres robots: un rover con ruedas “Crabli”, que permanecería en el borde del cráter, un dispositivo que descendía con patas y unido al anterior por un cable, para tomar muestras del fondo del cráter, y un gestor del cable de alimentación llamado “SpaghettiBot”.
El equipo de la Universidad de Surrey del Reino Unido tenía un rover llamado SELENE que se desplazaba sobre cuatro orugas.
El equipo de la Universidad de Oulu de Finlandia también eligió orugas para su rover, parecido a un tanque. Este equipo llegó con el sistema casi listo para funcionar, por lo que fueron los primeros en conducir su rover por las colinas próximas al campamento base el martes.
Las Pruebas
Tras tres días de ensamblaje, pruebas y puesta a punto, los equipos estaban listos para competir el viernes y el sábado a última hora de la tarde, en dos tandas de cuatro equipos. El equipo de Surrey, el primero programado para descender al cráter, se vio forzado a abandonar el desafío incluso antes de empezar por problemas con los motores.
El equipo de Finlandia, un fuerte candidato a la victoria por su sistema robusto y su experiencia en competiciones, fue el primero en intentarlo, pero su esfuerzo se truncó tras un comienzo prometedor al quemarse un fusible.
El equipo de la Universidad Jacobs consiguió solucionar los problemas con las comunicaciones y localizó las muestras con éxito, pero su oportunidad terminó justo después al encontrarse con problemas técnicos.
El último equipo del viernes, el de Madrid, comenzó su búsqueda de muestras con éxito, pero se vieron forzados a abandonar por problemas con la cámara y los motores.
En la tarde del sábado, la competición fue interrumpida por las nubes, pero dos de los cuatro equipos pudieron operar sus dispositivos. El equipo de la Universidad de Bremen realizó una misión perfecta con su rover CESAR; con sólo unos pequeños problemas técnicos. Su misión terminó heroicamente al depositar en la “plataforma de despegue” una muestra que pesaba exactamente 100g.
El equipo de Zurich consiguió empezar bien su misión, pero el sistema de tres robots tuvo pronto problemas con la caja del cable y finalmente el rover con ruedas agotó sus baterías. El rover con patas consiguió alcanzar el fondo del cráter, hasta que se rompió una de sus patas.
Los otros dos equipos se reprogramaron para la tarde del domingo, pero tuvieron que realizar una misión más compleja para compensar la falta de oscuridad. El equipo de la Universidad de Pisa alcanzó el fondo del cráter sin problemas de importancia, pero sufrieron un problema en un motor al recoger la muestra del terreno.
El último equipo, también de Pisa, de la Scuola Superiore Sant’Anna no pudo hacer nada el domingo, ya que la electrónica de su rover se dañó con las precipitaciones del sábado por la tarde.
Y el equipo ganador es:

El equipo de la Universidad de Bremen. Enhorabuena!!
“Aunque sólo haya completado la misión un equipo, creo que todos han ganado”, comenta Gianfranco Visentin. “Todos los equipos han tenido una experiencia fantástica. Queríamos que la gente estuviese motivada, se aventurase en la robótica espacial e hiciese algo relacionado con ella, por lo que esta experiencia ha sido un éxito rotundo.”
Para más información
Gianfranco Visentin
Head, Automation and Robotics Section
Tel: +31 71 565 4835
Email: gianfranco.visentin@esa.int
