
De Winne, pilote du bras robotique de la station
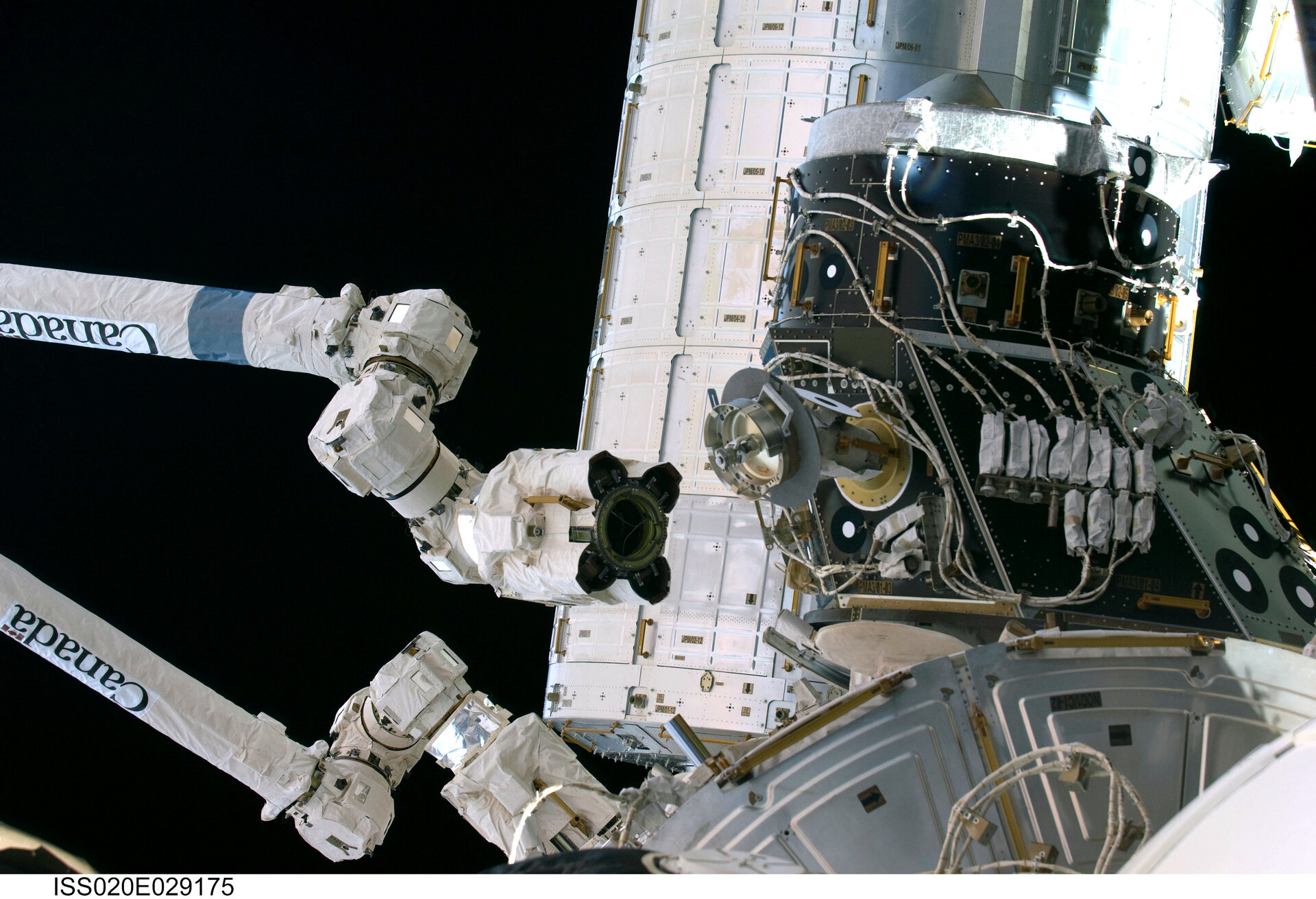
L’astronaute de l’ESA Frank De Winne a, le 8 août, “piloté” le bras télémanipulateur de la Station spatiale internationale ISS pour déplacer un adaptateur d’arrimage à l’extérieur du module Unity de la station. Le PMA-3 (Pressurized Mating Adapter-3) devait être changé de place pour préparer l’arrivée du Noeud 3 et de Cupola au début de l’année prochaine.
En compagnie du Canadien Robert Thirsk, membre d’équipage de l’expédition 20 et en étroite coordination avec les contrôleurs au sol, Frank a manœuvré le bras de 18 m de long depuis l’intérieur de la Station spatiale internationale ISS. Pressurized Mating Adapter-3 (PMA-3) a été déplacé du point d’attache qui fait face à la Terre (nadir) vers le mécanisme commun d’arrimage sur le point opposé du module.
Le PMA est l’un des adaptateurs “prise mâle” de forme conique. Il sert à connecter les vaisseaux spatiaux avec les modules ayant des mécanismes d’arrimage incompatibles. Son repositionnement était nécessaire pour préparer le mécanisme commun à l’arrivée, au début de 2010, du module Nœud 3 de fabrication européenne, qui a été baptisé Tranquillity par la NASA, ainsi que du module d’observation panoramique Cupola.

Depuis l’intérieur de la station, les astronautes De Winne et Thirsk ont entrepris les opérations, un peu avant 11 h heure de Paris (9 h GMT). Au moyen du bras télémanipulateur, ils ont saisi le PMA-3 et l’ont dégagé du point nadir d’Unity. Des commandes ont été envoyées à partir du sol pour manœuvrer le Canadarm 2 vers la nouvelle position du PMA-3 sur le côté gauche du module Unity. Frank et Robert ont repris en mains le bras pour refixer le PMA-3 sur son nouveau mécanisme de jonction. Cette tâche délicate qui a pris plus de six heures a été terminée en avance sur le plan prévu aux environs de 17 h 30 (15 h 30 GMT).
Dans ses commentaires concernant cette activité de robotique, l’astronaute De Winne a dit qu’il avait vécu une journée palpitante: "Tout compte fait, je me suis bien familiarisé aux opérations de robotique dans l’environnement spatial. Lors d’un travail de robotique, vous devez toujours être très concentré sur ce que vous faites. Il s’agit de travailler de façon très correcte et avec beaucoup d’attention, pour éviter la moindre erreur, même petite. »

"Tout s’est très bien déroulé, comme ce qu’on avait appris à l’entraînement, voire mieux. Le bras se déplace de façon très stable et les systèmes de contrôle manuel répondent mieux que lors des exercices dans les simulateurs où nous avons répété son maniement jusqu’à huit heures par jour !" Et d’ajouter : "Dans la réalité, ce fut un grand plaisir de travailler avec Bob. Nous sommes restés tous deux très concentrés et très calmes. Nous avons travaillé à un bon rythme pour rester en avance sur l’horaire."
Frank De Winne a suivi un entraînement intensif pour se servir tant du bras Canadarm 2 que du bras japonais. Plus tard, dans sa mission, il doit piloter ce bras pour transférer des charges utiles extérieures à partir du vaisseau japonais H-II Transfer Vehicle (HTV-1) qui doit arriver sur la station en septembre.


