

Le rover de l’ESA termine son exploration d’un désert similaire à Mars
Le rover de test de l’ESA a terminé son exploration de la surface et du sous-sol du désert de l’Atacama au Chili, similaire aux conditions trouvées sur Mars, et ce malgré les vents violents, les tourbillons de poussière et le terrain imprévisible.
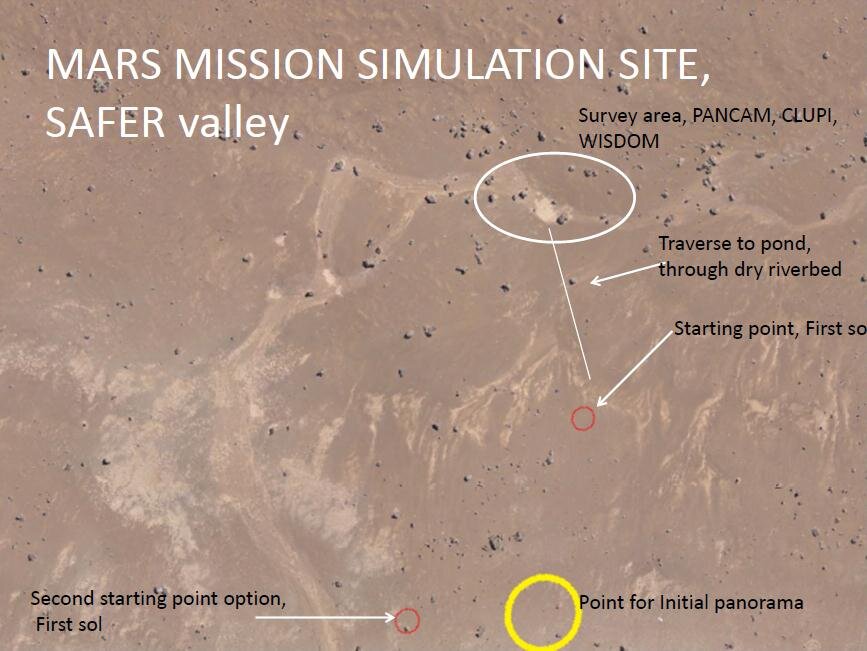
Les cinq jours de test d’Expérience de récolte sur le terrain d’échantillons avec un rover (SAFER - Sample Acquisition Field Experiment with a Rover) se sont terminés le samedi 12 octobre.
Une première version du rover ExoMars 2018 de l’ESA, équipée de trois prototypes d’instruments ExoMars, était supervisée depuis un centre de contrôle à distance situé dans les installations de Satellite Applications Catapult à Harwell, au Royaume-Uni.

Les superviseurs étaient installés devant un grand mur vidéo, sur lequel étaient combinées des données provenant des instruments du rover et de leurs propres cartes de planification 3D.
Ils ont passé en revue les données provenant du rover pour sélectionner de nouvelles cibles ou trajectoires à investiguer pendant les six jours martiens simulés.
“Le but de SAFER est de développer notre expérience dans le test d’un rover sur le terrain, donc l’équipe distante a travaillé de la manière la plus réaliste possible,” explique Michel van Winnendael, qui supervisait le test pour l’ESA.


Access the video
“Ils ont eu à planifier des points d’observation intéressants pour les instruments, et des trajets sûrs pour la navigation. Une fois qu’un plan était préparé, il était envoyé à l’équipe sur place qui le faisait suivre au rover, tout en faisant en sorte de demeurer aussi ‘invisibles’ que possible pour les opérateurs distants.”
Ils sont allés jusqu’à balayer leurs traces de pneus et leur empreintes de pas afin de ne pas donner par inadvertance au centre de contrôle à distance d’indices sur leur position.
Le rover Exomars était utilisé comme ‘mission de référence’ pour cet essai afin de maximiser son niveau de réalisme.
Tout comme le véritable rover le fera sur Mars, le rover de test – fourni par les équipes d’Astrium à Stevenage, au Royaume-Uni et surnommé ‘Bridget’ – incluait une caméra panoramique, un imageur macro ressemblant à un objectif de géologue, et un géoradar permettant d’identifier des sites propices à une excavation du sous-sol.
Le rover n’avait pas de foreuse, donc à chaque fois que le centre de contrôle ordonnait de creuser, c’est l’équipe locale qui intervenait pour creuser sur le site à la main. Cela a permis d’obtenir des échantillons en ‘réalité de terrain’, à la fois pour vérifier l’exactitude de l’analyse au radar et effectuer des analyses rapprochées.

“Sur le lieu de notre second forage simulé, l’équipe sur le terrain a trouvé une couche de roche qui commençait à une profondeur de 60 cm,” remarque Sev Gunes-Lasnet, chef de projet pour RAL Space. “C’était très proche du type de caractéristiques que l’équipe cherchait, analogue à un endroit sur Mars qui pourrait contenir des traces d’une vie présente ou passée.”
Un élément précieux du test sur le terrain réside dans ce qui est imprévisible: les vents violents du désert et une rencontre rapprochée avec un tourbillon de poussière ont conduit l’équipe locale à protéger leur centre de contrôle derrière un barrage de voitures, tandis que le rover lui-même n’était pas perturbé.
Un rocher plat qui s’est soudainement dressé sous le passage des roues avant de Bridget s’est révélé être un autre problème inattendu – de quoi nourrir la réflexion des concepteurs et des opérateurs du rover.
“L’équipe distante et l’équipe sur le terrain sont maintenant impatientes de découvrir comment les choses se sont passées ‘de l’autre côté’,” conclut Michel. “Les analyses vont se poursuivre pendant les prochaines semaines.”
Le samedi soir, le rover a fait un dernier trajet avant d’être remballé pour son retour au Royaume-Uni.

Pour remercier l’Observatoire européen austral (European Southern Observatory - ESO) du Mont Paranal, qui hébergeait l’équipe SAFER, Bridget a été emmené en haut de la montagne pour rencontrer le personnel de l’observatoire.
Ils ont pu voir le rover se déplacer, et ont eu la possibilité de le faire fonctionner à distance eux-mêmes.
A propos de SAFER

L’essai sur le terrain SAFER était supervisé par la direction technique et gestion de la qualité de l’ESA, et son équipe industrielle internationale était dirigée par RAL Space, une entité du conseil pour les installations pour la science et la technologie britannique (UK Science and Technology Facilities Council). L’activité est financée par le programme de base de recherche technologique de l’ESA, avec un cofinancement supplémentaire de l’Agence spatiale britannique.
Pour plus de renseignements sur le test SAFER, consultez le site de l’équipe : http://safertrial.wordpress.com.




