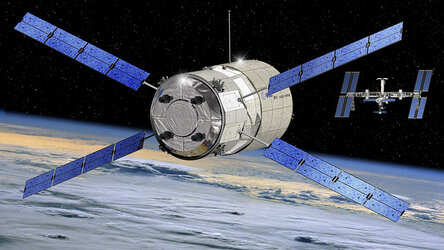
Succès des manœuvres de l'ATV « Jules Verne » avant une démonstration cruciale
L'ATV « Jules Verne » a accompli deux manœuvres orbitales aujourd'hui, se propulsant jusqu'à une altitude de 303 km - à mi-chemin entre l'orbite d'injection sur laquelle l'avait placé son lancement dimanche dernier et l'orbite de la Station spatiale internationale.
Pour ces transferts orbitaux, l'ATV a utilisé deux de ses quatre moteurs principaux. Chaque mise à feu a duré approximativement 2 minutes et fourni un changement de vitesse d'un peu plus de 6 m/s. Ces deux mises à feu en suivaient deux autres effectuées hier sur commande des contrôleurs de mission au Centre de contrôle de l'ATV de l'ESA à Toulouse.
« Tout fonctionne parfaitement désormais aussi bien sur la chaîne de propulsion principale que sur la redondance, » se réjouit John Elwood, directeur de projet ATV à l'ESA. « La même chaîne - Configuration de Propulsion A - que nous avons activée lundi a été utilisée pour les deux mises à feu d'hier et pour celles d'aujourd'hui. »
« Le vaisseau dans son ensemble fonctionne à merveille et le degré de contrôle effectif au cours de ces manœuvres a même été meilleur que nous ne l'attendions, » poursuit John Elwood. Après analyse, les mises à feu d'hier se sont même révélées avoir été effectuées avec une marge de 0,3% par rapport à l'objectif.

Ces manœuvres ont augmenté l'altitude du
Après une première mise à feu cet après-midi à 13h20, heure d'Europe continentale, une seconde a suivi à 14h01 et a été commandée et surveillée via Artemis, le propre satellite-relais de l'ESA, en raison d'un trou dans la couverture du réseau américain TDRS à ce moment là. Cette manœuvre a donc été 100% européenne.
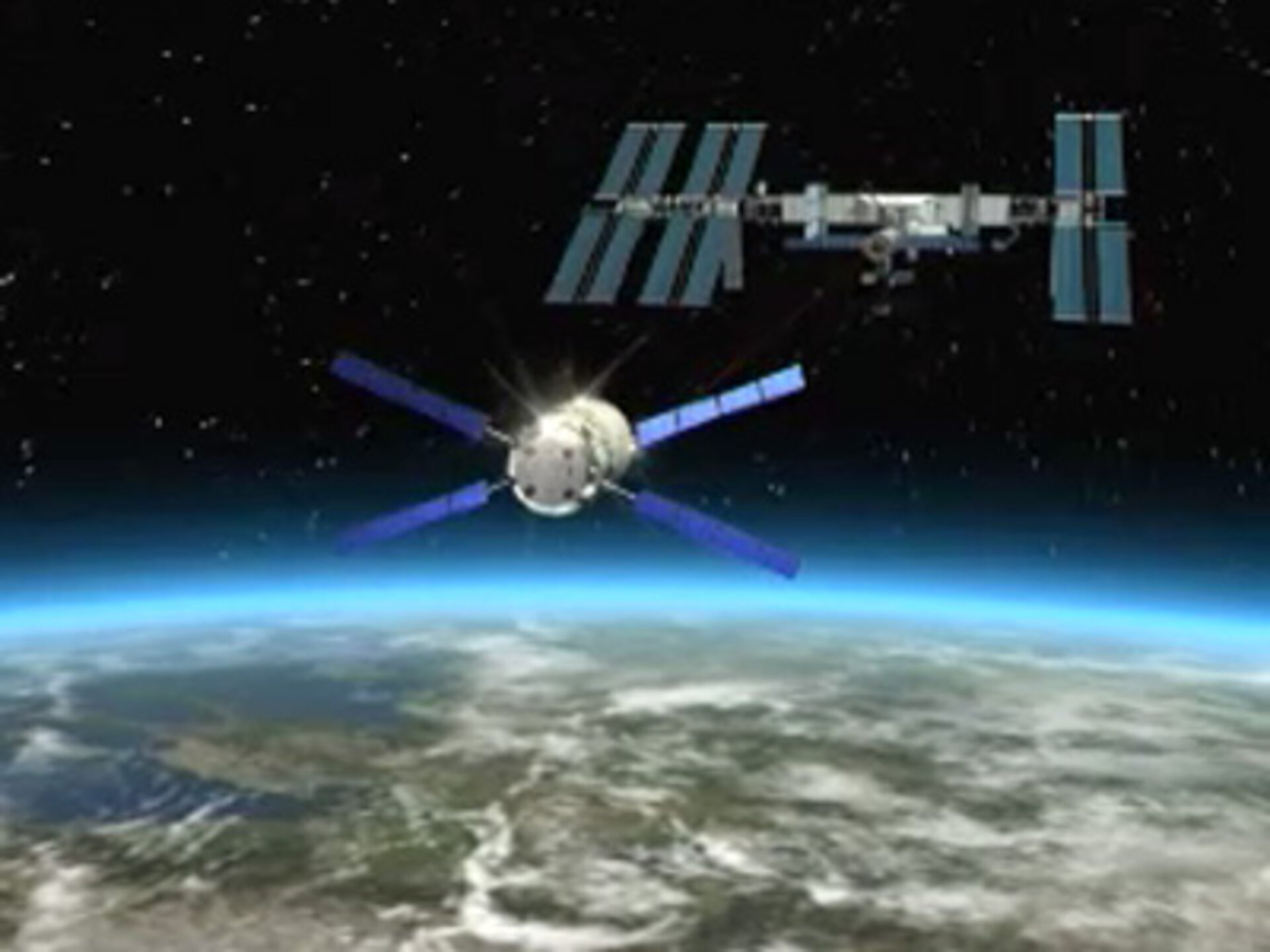
Au cours des deux prochains jours, l'équipe ATV va mettre à l'essai l'une des fonctions de sécurité principales du vaisseau, la manœuvre anti-collision, ou CAM (Collision Avoidance Manoeuvre). L'ATV « Jules Verne » est équipé d'un système totalement indépendant grâce auquel, en cas de nécessité, il peut recevoir une impulsion dans la direction opposée à la Station spatiale durant la procédure d'amarrage automatique.
Une CAM mettrait en œuvre un système de contrôle entièrement indépendant, avec ses capteurs et ses propulseurs, géré par un ordinateur séparé fonctionnant avec un logiciel développé complètement à part du reste de l'ATV.

« Si tout le reste est en panne, c'est la manœuvre qui sert réellement de "redondance des redondances". Si les choses vont vraiment mal, c'est notre ultime système de sécurité, » explique John Elwood.
Un essai du système gérant la CAM est prévu pour la 13 mars. Il débutera vers 11h00, heure d'Europe continentale, et se déroulera au travers d'une importante série de procédures pour s'achever vers 17h00. Les contrôleurs de missions analyseront ensuite les données pour confirmer que tout s'est déroulé comme prévu.
Une démonstration réelle de la manœuvre anti-collision est prévue pour vendredi 14 mars, à partir de 8h56, heure d'Europe continentale.
« La démonstration de la CAM est vraiment une activité critique, car elle implique d'éteindre les systèmes principaux du vaisseau et de voler réellement sous le contrôle du système de secours de la CAM. Nous surveillerons le vaisseau de très près ce vendredi, » reconnaît Bob Chesson, le chef de l'équipe des opérations de vols habités de l'ESA.
Cette intense activité pour l'équipe du « Jules Verne » intervient juste après le succès de l'opération de récupération réalisé durant la nuit du 10 mars, quand une des chaînes de commande de propulsion a été réactivée après avoir été désactivée automatiquement peu après le lancement.
Cette récupération a été une opération complexe, qui a impliqué des ingénieurs du maître d'œuvre industriel Astrium, l'équipe de projet ATV à l'ESA et l'équipe conjointe de contrôle de mission ESA-CNES au Centre de contrôle de l'ATV.
« Nous étions inquiets, mais le "Jules Verne" va bien maintenant. Je ne crois pas avoir jamais vu une coopération si forte entre autant d'équipes réalisée de manière aussi efficace. C'était incroyable de voir ces gars-là en action, » affirme Bob Chesson.