Impressionnante répétition générale pour l'ATV « Jules Verne »
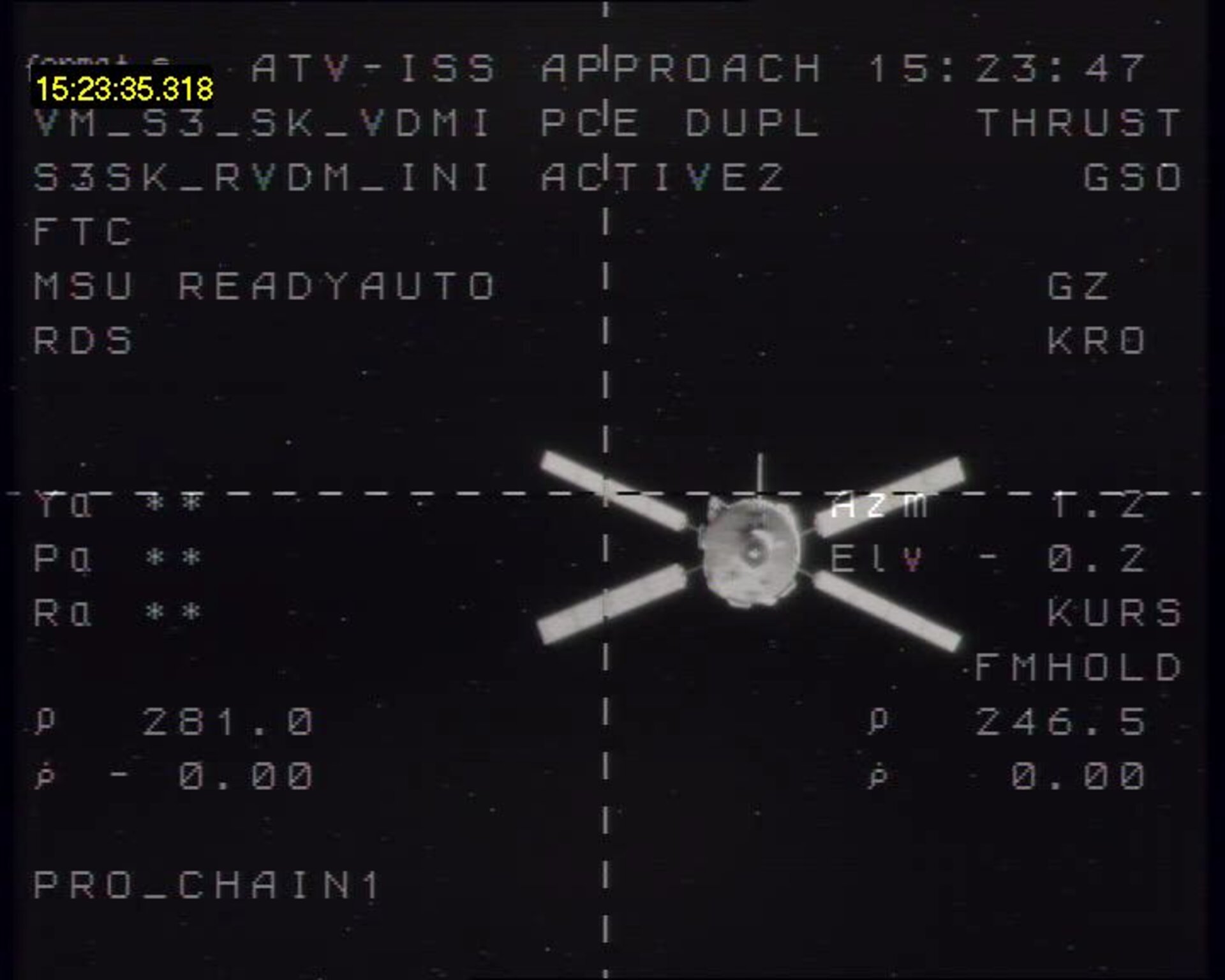
Aujourd'hui, l'ATV « Jules Verne » s'est approché à tout juste 11 mètres de la baie d'arrimage du module russe Zvezda. Cette approche était le point d'orgue de la seconde journée de démonstration de l'ATV qui ouvre la voie à la première tentative de rendez-vous et d'amarrage prévue le 3 avril.
« Je suis connu pour ma retenue, mais le seul mot qui me vienne à l'esprit à propos d'aujourd'hui est "impressionnant" » a admis John Ellwood, chef de projet ATV à l'ESA. « C'était impressionnant de voir comment le "Jules Verne", les équipes au Centre de contrôle de l'ATV et les centres de contrôle de Moscou et de Houston ont interagi. C'était une répétition générale parfaite pour jeudi. »
Les manœuvres réalisées aujourd'hui comprenaient la première démonstration du système de navigation optique, appelé à jouer un rôle crucial et basé sur la technologie de vidéomètres développée en Europe. L'ATV a également fait la preuve de sa capacité à utiliser ce système pour naviguer en toute autonomie jusqu'à 11 m de l'ISS
« Cette journée de démonstration a montré une nouvelle fois que les performances du vaisseau sont même meilleures que ce à quoi nous nous attendions, » a souligné Nicolas Chamussy, chef de projet ATV chez Astrium. « C'est une première mondiale dans le domaine des rendez-vous spatiaux automatiques utilisant des capteurs optiques, qui suit la première démonstration dans le monde de navigation par GPS relatif entre le “Jules Verne” et la Station, réalisée samedi. »
« Aujourd'hui, cela a été un grand succès pour le Centre de contrôle de Toulouse qui a pu orchestrer une mission au standard du vol habité avec la Station et il s'agissait d'une étape importante et très prometteuse pour la tentative d'amarrage de jeudi », s'est félicité Lionel Baize, chef de projet ATV-CC au CNES. « C'était un incroyable défi de faire travailler ensemble trois centres de contrôle et d'interagir en direct avec l'équipage de l'ISS. »

Les contrôleurs de mission, au Centre de contrôle de l'ATV (ATV-CC) à Toulouse, ont également confirmé qu'ils pouvaient envoyer certaines commandes très spécifiques vers le « Jules Verne », telles que “Arrêt” et “Reprise”. Ces commandes pourraient avoir à être envoyées dans le cas où un problème imprévu surviendrait dans le système de guidage automatique de l'ATV.
La démonstration d'aujourd'hui comprenait aussi la première participation active de l'équipage de l'ISS à la mission. Une fois que l'ATV a atteint son point de stationnement à 11 mètres, les astronautes ont reçu l'instruction d'émettre une commande de "Retraite" qui a renvoyé le « Jules Verne » vers sa position de référence à 19 mètres. L'équipage a ensuite envoyé une commande "Eloignement" qui a automatiquement envoyé le « Jules Verne » à distance de sécurité par rapport à l'ISS.
L'approche à faible distance de l'ISS a donné à l'équipe ATV une occasion d'examiner quelques unes des protections thermiques qui ont été endommagées à l'extérieur du vaisseau. « Elles se trouvent exactement là où notre analyse thermique l'avait prédit. A cet instant, nous n'envisageons pas que cela ait le moindre impact sur notre première tentative d'amarrage prévue jeudi, » a expliqué John Ellwood. « Nous avons évalué avec nos partenaires de l'ISS le surcroît de puissance dont nous pourrions avoir besoin pour maintenir la température et nous ne prévoyons aucun problème. »
Les données recueillies durant la 2e journée de démonstration seront mises à disposition des responsables de l'ISS pour qu'ils puissent donner leur feu vert à la première tentative d'amarrage jeudi. L'amarrage de l'ATV « Jules Verne » avec l'ISS est prévu à 16h41 CEST (14h41 TU) le 3 avril.