
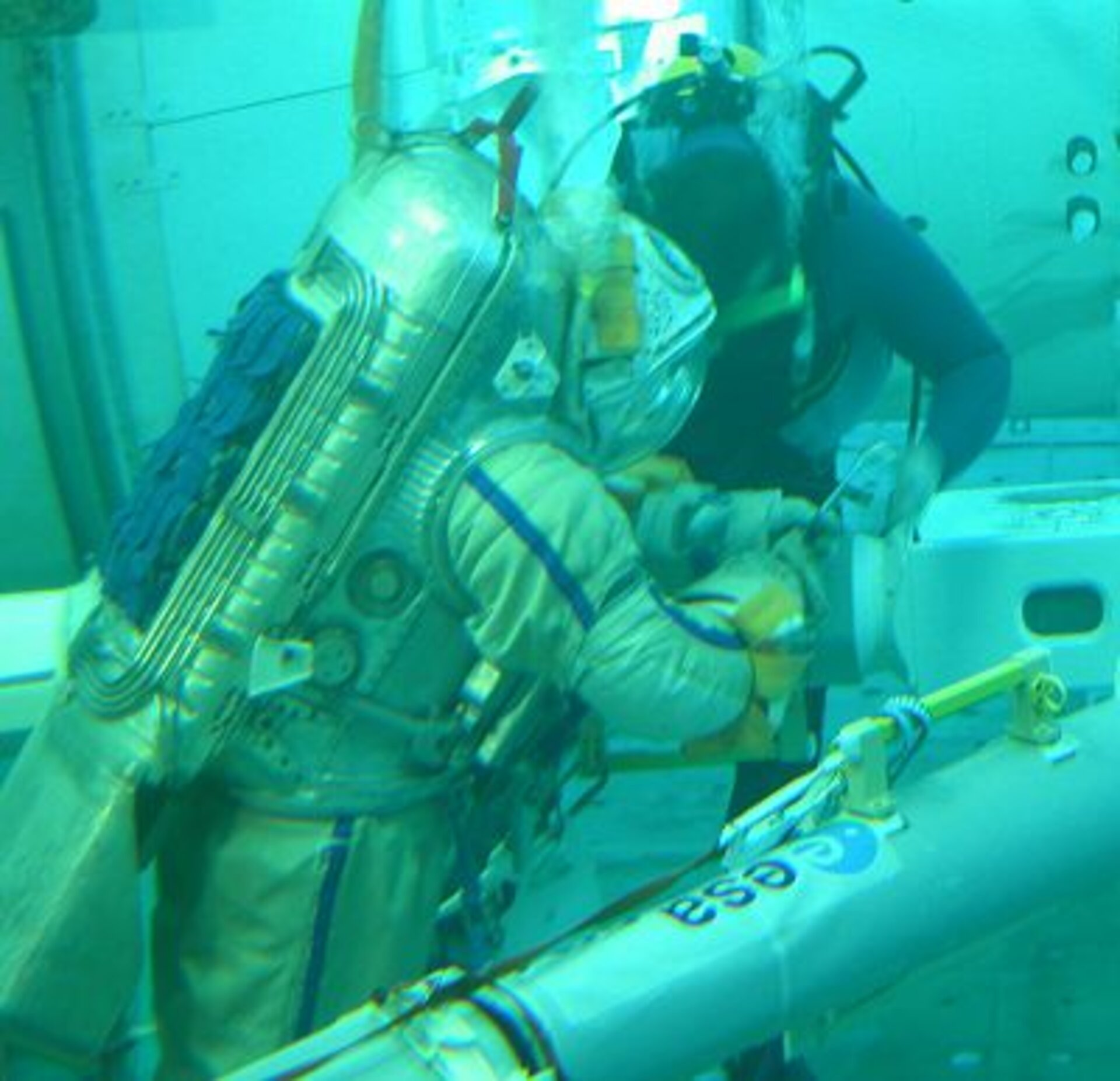
Un astronaute de l'ESA travaille sous l’eau pour les essais du bras robotisé européen
Le modèle WET du bras robotisé européen (ERA) a été contrôlé et essayé en profondeur au centre de formation de cosmonautes Gagarine près de Moscou la semaine dernière. L’astronaute André Kuipers de l’ESA a revêtu pour l’occasion un vêtement spatial Orlan russe. Il a passé plus de trois heures sous l’eau avec la maquette du bras robotisé, construit en 1998, mais toujours en parfait état.
Impressionnant
Ce bras robotisé impressionnant fait plus de onze mètres de long et pèse 630 kg. Dès que ce bras sera en place sur la station spatiale internationale (ISS), le module laboratoire polyvalent (MLM) russe deviendra son port d’attache. Grâce à sept articulations, une gamme complète d’outils et des ses appareils électroniques, cet assistant de l’astronaute peut se déplacer tel un insecte autour des segments russes de la station spatiale internationale où il servira à plusieurs tâches différentes.

Comme l’explique Philippe Schoonejans, responsable du projet ERA à l’ESA : « Le bras ERA peut travailler avec le sas russe, les astronautes n’ont donc plus à s’aventurer à l’extérieur de la station spatiale pour poser certaines pièces matérielles. A l’aide de cameras vidéo, le bras peut effectuer des contrôles à l’extérieur de la station, il peut déplacer des expériences et fournitures ou même servir de grue pour les astronautes ».
André Kuipers a essayé le modèle d’essai en environnement d’apesanteur de l’ERA aussi appelé modèle « WET » (Weightless Environmental Test). Ce modèle a été construit en 1998 par un groupement de sociétés dirigé par Dutch Space des Pays-Bas. Au départ ERA aurait dû être lancé par la navette spatiale en 2001 mais ce lancement a été retardé en raison des circonstances. L’été dernier la décision a été prise de lancer le bras robotisé en novembre 2007 à bord d’une fusée russe Proton avec le module MLM.
Du pain sur la planche

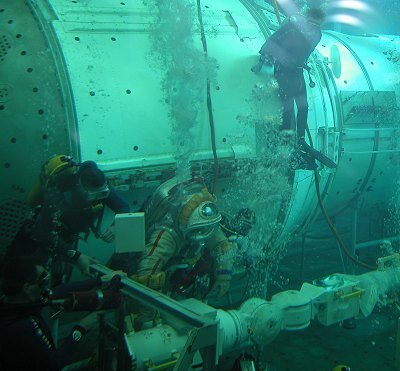
Il reste beaucoup de travail d’ici là. La semaine dernière dans un exercice sous-marin dirigé par André Kuipers, le modèle WET a été démonté avant d’être remonté. André Kuipers, avec le russe Dmitry Verba, a aussi vérifié les commandes manuelles, qui servent de secours pour le système automatisé. « L’exercice était difficile. Il a fallu beaucoup de patience » selon l’astronaute hollandais. « Nous avons dû faire beaucoup de mouvements de rotation pour la commande manuelle du bras. Ce n’est pas facile sous l’eau ».
Le bras a bien fonctionné. Mais Philippe Schoonejans a conclu que des améliorations restaient à faire. Certaines opérations à une seule main ont dû être effectuées par André Kuipers à deux mains, ou avec l’aide de Dmitry Verba, car l’astronaute n’avait aucun moyen de stabilisation. Une solution possible serait d’utiliser un mécanisme de fixation mobile. Un jeu de clés devra être modifié, car elles s’échappaient lors du serrage des vis, ce qui faisait perdre un temps précieux. Le matériau d’isolation, qui par moment a masqué le champ des caméras vidéo, devra aussi être mieux fixé.
Perfection
Pour l’année qui vient la société russe Energia, ainsi que les partenaires européens qui ont construit l’ERA, travailleront à perfectionner le bras robotisé. A partir de 2006, quand les nouvelles procédures seront prêtes, les équipages des futures expéditions vers l’ISS s’entraîneront pour la première fois avec le bras ERA. Ils connaîtront parfaitement l’ERA avant son lancement en 2007.

