6. Europa-Premiere: Rendezvous- und Docking
Mit „Jules Verne“ wird Europa erstmals Rendezvous- und Dockingmanöver mit einer Raumstation durchführen und somit eine Technik beherrschen, über die die russischen und amerikanischen Raumfahrtingenieure bereits seit langem verfügen. Angesichts der Größe und Masse des Objektes kein leichtes Unterfangen.
Drei Kontrollzentren für eine ATV-Mission
Drei Kontrollzentren sind an der Überwachung einer ATV-Mission beteiligt: die ISS-Kontrollzentren in Houston (USA) und Moskau (Russland) sowie das eigens für ATV geschaffene Kontrollzentrum in Toulouse (Frankreich), das die Steuerung des europäischen Weltraumtransporters durchführt. Während der besonders kritischen Phasen einer ATV-Mission – vom Start bis zur Ankopplung und vom Ablegen bis zum Wiedereintritt – arbeiten hier 60 Spezialisten rund um die Uhr. Seit vielen Monaten bereiten sich die Teams durch Simulationstrainings auf dieses Ereignis vor. Dabei wurden auch die außergewöhnlichsten Situationen bis zum Totalausfall der Kommunikationslinien geprobt und Strategien zur Meisterung solcher Situationen entwickelt.
Das eigentliche Kopplungsmanöver soll über russisches Staatsgebiet erfolgen, damit das Flugleitzentrum in Moskau das Andocken des ATV an das Swesda-Modul direkt 20 Minuten überwachen kann. Das gesamte Andockmanöver wird aber vom Missionskontrollzentrum in Toulouse gesteuert.
Annäherung in Etappen

Die Annäherung an die Raumstation sowie das Andocken verlaufen in mehreren Etappen und beruhen auf einer Vielzahl von Sensoren. In der ersten Flugphase – sie wird bei „Jules Verne“ zehn Tage einnehmen – basiert die Steuerung auf einer Kombination aus Sternsensor- und GPS-Daten.
Die vollautomatische Rendezvous- und Andockphase beginnt in einer Entfernung von knapp 30 Kilometern zur ISS. Zu diesem Zeitpunkt befindet sich das ATV noch 6 Kilometer unter der Bahnebene der ISS. Jetzt sind Anpassungsmanöver erforderlich, die das Raumschiff an Höhe gewinnen lassen. Sobald das ATV die Umlaufbahn der ISS präzise erreicht hat, folgt es ihr in gebührendem Abstand. Bei 3500 Metern Entfernung ist der erste Haltepunkt zur Überprüfung der Systeme eingebaut. Die weitere Annäherung erfolgt in einzelnen Schritten, wobei jeder Schritt von „Toulouse“ gestartet und vom ATV automatisch ausgeführt wird. Bis zur Kopplung sind weitere Haltepunkte bei 250, 20 und 12 Meter Entfernung eingeplant.
Noch 20 Meter
In einer Entfernung von 250 Metern können die Raumfahrer nun die weitere Annäherung direkt per Video verfolgen. Aber anders als bei den kleinen Progress-Frachtern, den die Raumfahrer im Notfall auch von der Station aus direkt heransteuern könnten, bleiben sie bei ATV passive Beobachter. Sollte wider Erwarten eine kritische Situation eintreten, können sie das Annäherungsmanöver per Knopfdruck sofort beenden. Das ATV zieht sich dann auf einen festgelegten Haltepunkt zurück. Darüber hinaus sorgt ein Sicherheitssystem dafür, dass bei einer fehlerhaften Arbeitsweise eines Bordsystems der Raumtransporter gestoppt und automatisch in seine vorherige Position zurück gefahren wird. Dort parkt er solange, bis das System überprüft und nach Behebung der Fehler eine erneute Annäherung in die Wege geleitet werden kann.
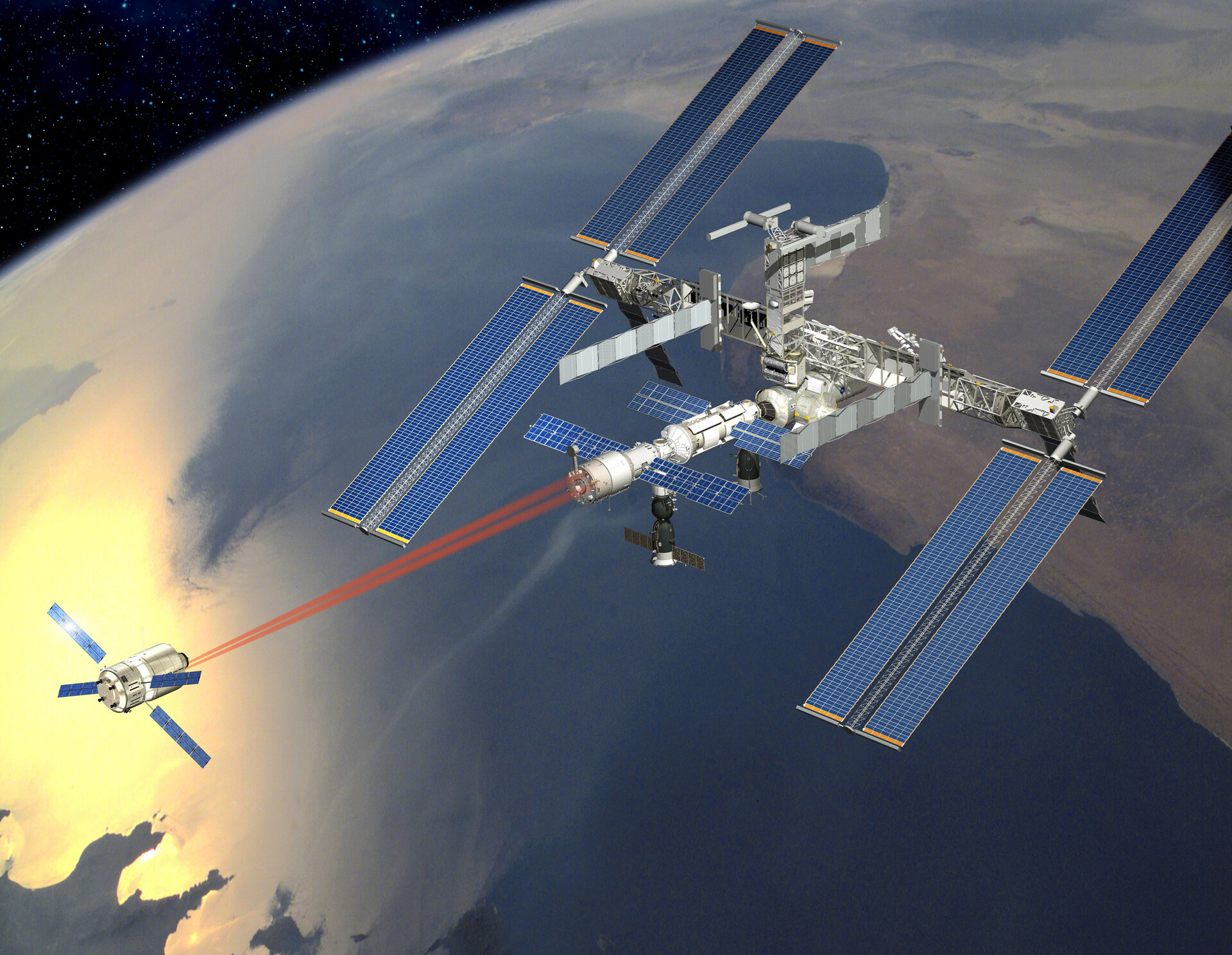
Auf den letzten 20 Metern des Annäherungsmanövers erkennt das Videometer automatisch die Zielmuster der mit einem Laserstrahl beleuchteten passiven Reflektoren und berechnet die Entfernung und Richtung zur Andockstelle. Für zusätzliche Sicherheit sorgt das Telegoniometer, das Laserimpulse mit einer anderen Wellenlänge an die Rückstrahler sendet.
Die Kopplung eines Giganten

Zwölf Meter vor der ISS verbleibt das Raumschiff zunächst in dieser Entfernung. Die ISS-Crew überprüft anhand eines Videobildes, ob die Annäherung nominal verläuft. Nach ihrer Freigabe nähert sich der Transporter mit einer Relativgeschwindigkeit von wenigen Zentimetern pro Sekunde dem Swesda-Modul. Dabei bewegen sich beide Flugkörper mit rund 28 000 Stundenkilometer um die Erde. Die ausgefahrene Kopplungsspitze mit einem Durchmesser von 15 Zentimetern muss dabei in den 90 Zentimeter großen Trichter am Swesda-Port bugsiert werden und einrasten. Dann ist die Kopplung vollbracht.
Nunmehr richtet sich das ATV zur Längsachse der ISS aus um eine stabile mechanische Verbindung herzustellen. Diese muss in der Lage sein, die bei Reboost-Manövern auftretenden Schubkräfte gefahrlos auf die ISS zu übertragen. Sämtliche elektrischen und mechanischen Fixierungen sowie die Verbindungen der Treibstoffleitungen zwischen ISS und Raumtransporter verbinden sich nun vollautomatisch. Nach verschiedenen Überprüfungen können die Raumfahrer die knapp einen Meter große Ladeluke öffnen und mit dem Umpacken der Güter beginnen.