Alexander Gerst steuert ESA-Rover aus dem Weltall
Mit Blick auf unseren Planeten aus dem All steuerte ESA-Astronaut Alexander Gerst gestern den autogroßen ESA-Rover Eurobot durch eine Reihe von komplexen Manövern am Boden. Damit wurde die Arbeitsweise eines neuen Weltraumnetzwerks unter Beweis gestellt, das es Astronauten ermöglicht, eine Verbindung mit Fahrzeugen in unbekannten Welten aufzubauen.
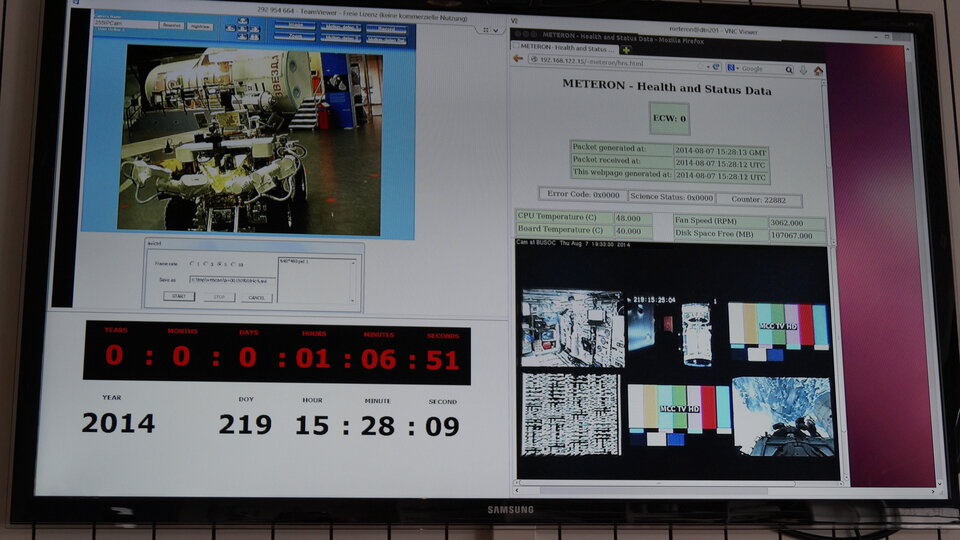
Während der spannungsgeladenen 90-minütigen Liveverbindung am 7. August mit der ISS – die in 400 Kilometern Höhe und mit 28.000 km/h im Orbit um die Erde raste – steuerte Gerst den ESA-Rover über einen speziellen Controller-Laptop, der es ihm mittels Video- und Datenfeedback ermöglichte, Befehle an den Rover zu senden.
Die Verbindung wurde durch ein neu entwickeltes Netzwerk ermöglicht, das Befehle speichert, sobald durch Verlust des Sichtkontakts mit der Erde oder der Oberflächeneinheit Signale unterbrochen werden, und sie weiterleitet, sobald der Kontakt wieder hergestellt ist.
In Zukunft wird man für die Steuerung von Robotern auf dem Mars oder dem Mond eine Art „Weltrauminternet“ benötigen, um Telekommandos zu übermitteln und Daten zu empfangen. Damit eine Verbindung zwischen Astronauten oder Rovern auf dem Mars und dem Missionskontrollteam am Boden gewährleistet ist, muss ein derartiges Netzwerk auch für Signalverzögerungen über riesige Distanzen gerüstet sein.


Access the video
Der Testlauf war der zweite in einer Reihe von Experimenten im Rahmen des Meteron-Projekts. In dem vorherigen Experiment steuerte NASA-Astronautin Sunita Williams im Jahr 2012 mit einer ersten Netzwerkversion einen Modellrover im Europäischen Satellitenkontrollzentrum der ESA (ESOC) in Darmstadt.
Rover-Führerschein
„Dies war das erste Mal, dass Eurobot vom Weltraum aus gesteuert wurde. Der Test war Teil eines Experiments zur Validierung von Kommunikations- und Betriebstechnologien, die bei zukünftigen bemannten Raumfahrtmissionen eingesetzt werden sollen“, erklärt Kim Nergaard, Leiter der Abteilung für zukünftige Missionen im ESOC.
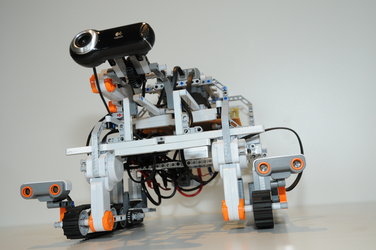
Während der Demonstration, die um 18:35 Uhr MESZ (16:35 Uhr GMT) begann, übermittelte Eurobot – per Telemetrie und Stream – Daten und Bilder an die ISS, mit deren Hilfe Alexander Gerst dem Rover den Befehl erteilte, sich zu bewegen und Fotos aufzunehmen.
Eurobot bewegte sich im Kriechtempo über das Testgelände im ESA-Technikzentrum ESTEC, im niederländischen Noordwijk, während die Bodenkontrolle vom ESOC aus erfolgte und das störungstolerante Netzwerk über das USOC (Station User Support and Operations Centre) in Brüssel und die NASA geleitet wurde.
Bereit für die Erkundung unbekannter Welten
Als Teil der Vorbereitungen wurden im Juli mehrere Live-Verbindungen zwischen den Bodenstationen Darmstadt, Noordwijk und Brüssel und der ISS geschaltet.
„Die heutige Demonstration verlief noch besser als die vorangegangenen Simulationen“, meint Daniela Taubert, Betriebskoordinatorin von Meteron. „Überhaupt verlief das ganze Experiment überaus reibungslos. Alex arbeitete schneller und effizienter, als wir es erwartet hatten.“
William Carey, ESA-Projektingenieur bei Meteron, stimmt zu: „Es ist großartig, dass wir diesen Praxistest durchgeführt und damit einen Teil zur Weiterentwicklung von ESAs Langzeitstrategie, Menschen und Roboter zu Forschungszwecken in unser Sonnensystem zu schicken, beigetragen haben.“
Höchstwahrscheinlich werden im Rahmen der zukünftigen Weltraumforschung robotische Forscher eingesetzt werden, um unbekannte Oberflächen im All zu untersuchen, bevor Menschen darauf landen. Um dies möglich zu machen, führt die ESA das Forschungsprogramm Meteron (Multi-Purpose End-To-End Robotic Operations Network) durch, das Menschen und Roboter miteinander vernetzt.
Weitere Fotos hier: ESOC via Flickr.