

Lunar Robotics Challenge auf Teneriffa
Acht Teams aus sechs Ländern beteiligten sich am Endausscheid des Lunar Robotics Challenge auf der spanischen Ferieninsel Teneriffa. Die ESA hat erstmals Studenten europäischer Universitäten eingeladen, mit selbst entworfenen Robotern für künftige Mondmissionen in den Wettstreit zu treten.
Ein Fahrzeug auf dem Mond zu betreiben ist nicht einfach. Die Forschungsroboter müssen raues und steiles Terrain überwinden, das mit verkrusteten Schichten und Staub bedeckt ist. Und da der Mond keine Atmosphäre besitzt, sind auch die Widrigkeiten des Vakuums zu berücksichtigen. Wenn die Sonne scheint, erhitzen sich die Roboter auf bis zu 110° Celsius, während in der Mondnacht die Temperaturen bis auf minus 100° Celsius fallen, in Polarregionen sogar noch darunter.
Der vergangene Woche stattgefundene ESA-Wettbewerb lief unter wesentlich komfortableren Bedingungen für Mensch und Maschine ab. Das Gelände war allerdings genauso schwierig wie in den Polregionen des Mondes. Und um die Gegebenheiten des Mondes besser zu simulieren, mussten die Teilnehmer ihre Roboter außerdem nachts auf den Weg schicken.
Gewaltige technologische Herausforderung
Der erste Lunar Robotics Challenge der ESA war Ende März ausgerufen worden. Die Studenten europäischer Universitäten wurden eingeladen, einen mobilen Roboter für den Mond zu entwickeln, der Bodenproben aus einem mondähnlichen Krater aufnehmen kann. Die Arbeiten der acht Teams wurden dabei vom General Studies Program (GSP) der ESA unterstützt.
Die Roboter sollten nicht schwerer als 100 Kilogramm sein und nicht mehr als zwei Kilowatt Energie verbrauchen sowie während des Transports zum Mond maximal einen halben Kubikmeter Platz benötigen.
Während der Testmission mussten die mobilen Geräte vom Landepunkt der virtuellen Mondsonde bis zum Rand eines mondähnlichen Kraters bewegt werden, dort den mit 15 Metern tiefsten Punkt des Kraters erreichen, wenigstens 0,1 Kilogramm vorbereiteter charakteristischer Bodenproben aufnehmen und zurück zum Landepunkt befördern. Beim Ab- und Aufstieg des Roboters im Krater war eine Hangneigung von bis zu 40 Grad zu überwinden.
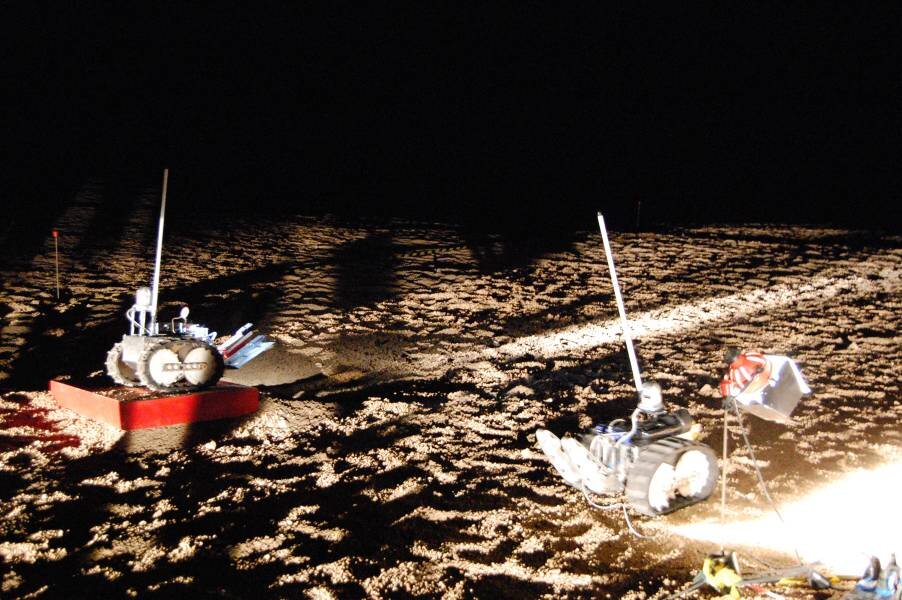
Gesteuert wurden die „eisernen Gesellen“ mit Hilfe von Workstations, die außerhalb des Kraters an einem Platz stationiert waren, von dem aus weder der Krater noch dessen Rand zu sehen waren. Und all das musste unter schlechten Lichtverhältnissen mit langen Schatten am Kraterrand und völliger Dunkelheit im Krater realisiert werden.
Auch Deutsche und Schweizer beteiligt

Der Höhepunkt des Wettbewerbs war schließlich in der letzten Woche der Endausscheid auf Teneriffa.
Zwei der Teams kamen aus Deutschland, eines aus der Schweiz. Außerdem konnten sich fünf weitere Gruppen aus Italien, Spanien, Großbritannien und Finnland qualifizieren.
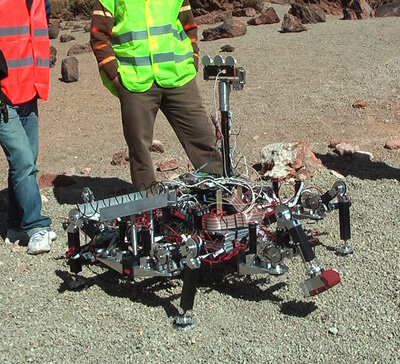
Das Team der Universität Bremen ging mit einem dreirädrigen und sehr leichten Gerät namens Crater Exploration and Sample Return Robot (CESAR) in den Wettkampf. Zusätzlich zum Rover wurde noch ein Funkrelais am Kraterrand abgesetzt, um damit die Fernseh- und Kommunikationsverbindung zwischen Rover und Basisstation zu gewährleisten.
Die zweite deutsche Gruppe von der Jakobs-Universität Bremen brachte zwei kleine panzerfahrzeugähnliche Roboter mit. Während einer als Kommunikationsrelais fungierte, wurde der andere zum Kraterboden gesteuert. Die Bremer hatten mit ihren „Blechkameraden“ bereits auf dem RoboCup German Open 2008 zwei erste Plätze erzielt.
Die Schweizer von der Eidgenössischen Technischen Hochschule (ETH) in Zürich beteiligten sich mit einem System, das aus drei Robotern bestand: einem radgetriebenen Rover „Crabli“, der am Kraterrand stehen blieb, einem Kletterroboter der gesichert durch ein Halteseil von Crabli aus zum Kraterboden „kletterte“ und Bodenproben aufnehmen sollte, sowie „SpaghettiBot“, einem Energiekabelträger, an dem der Kletterroboter befestigt war.
Und Action!
Sonnabendabends wurde der Wettbewerb durch aufziehende Wolken unterbrochen. Trotzdem konnten zwei Teams ihre Rover noch auf die „Piste“ schicken. Das schlechte Wetter zwang die beiden letzten Teams allerdings, erst am Sonntagnachmittag zu starten.
Einzig die Studenten der Universität Bremen legten eine Bilderbuchmission hin, die damit endete, dass genau 100 Gramm der Bodenprobe bis zum Landepunkt zurück gebracht wurden. Zwei weitere Teams waren nahe am Missionserfolg.
Vom Pech verfolgt war das Schweizer Team. Die „SpaghettiBot“ genannte Kabelbox steckte fest und hätte mit der Hand befreit werden müssen, was Strafpunkte kostet. Zum Schluss waren schließlich noch die Batterien des „Crabli“-Roboters erschöpft und beim Kletterroboter brach ein Hinterbein weg.
Einer besonderen Herausforderung musste sich Gianfranco Visentin, Leiter des Automation and Robotics Laboratory des Weltraumforschungs- und Technologiezentrums (ESTEC) der ESA stellen, denn er leitete als einer der Initiatoren des Wettbewerbs die Jury zur Ermittlung eines Siegers. „Wir brauchten einige Zeit, um alle Gut- und Strafpunkte der Teams auszuwerten, denn die Wetterbedingungen zwangen uns, den Zeitplan des Wettbewerbs zu ändern und die Ergebnisse sind deshalb nicht direkt vergleichbar gewesen.“ sagte Visentin. Nun steht der Sieger fest. Mit einem gewaltigen Vorsprung und 940 Punkten konnte das Team der Universität Bremen die Wettbewerber förmlich deklassieren. Insgesamt wurden die acht Teams wie folgt bewertet:
| Team | Bonuspunkte | Strafpunkte | Gesamt |
| University of Oulu | 675 | 155 | 520 |
| Politechnic University of Madrid | 675 | 282 | 393 |
| Jacobs University | 775 | 480 | 295 |
| University of Surrey | 0 | 0 | 0 |
| University of Bremen | 1200 | 260 | 940 |
| Sant'Anna School of Advanced Studies | 500 | 345 | 155 |
| Swiss Institute of Technology in Zurich | 675 | 465 | 210 |
| University of Pisa | 825 | 170 | 655 |
Weitere Informationen erteilt:
Gianfranco Visentin
Leiter Automation and Robotics Section
Tel.: +31 71 565 4835
Email: gianfranco.visentin @ esa.int
