
ESA-astronaut prøver ut europeisk robotarm under vann
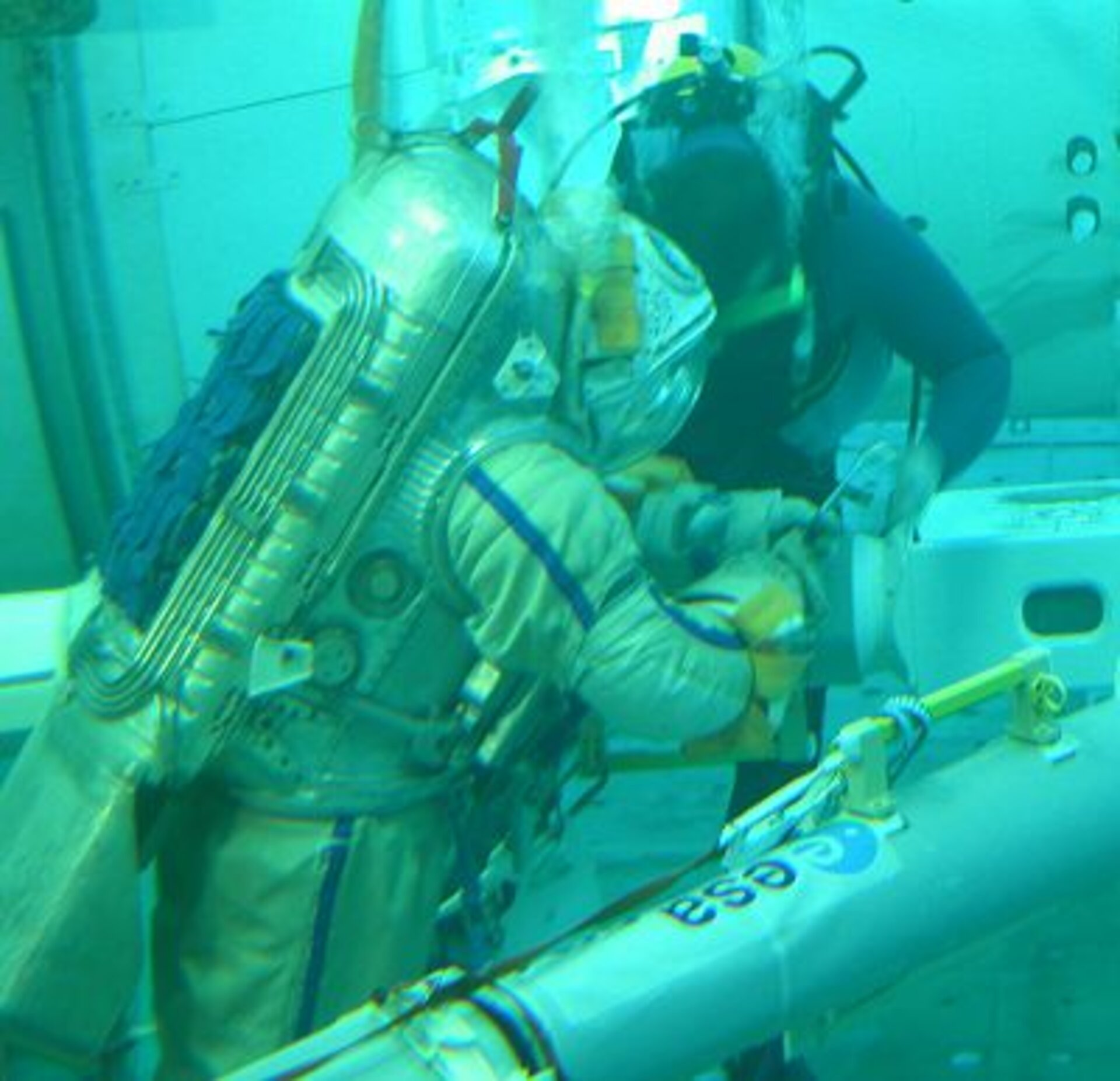
WET-modellen av den europeiske robotarmen (ERA) ble grundig undersøkt og utprøvd ved Gagarin Kosmonaut-treningssenter ved Moskva i forrige uke. ESA-astronaut André Kuipers iførte seg en russisk Orlan-romdrakt for anledningen. Han tilbrakte over tre timer under vann sammen med modellen av robotarmen. Den ble bygget i 1998, men virker fremdeles perfekt.
Imponerende
Den imponerende robotarmen er over elleve meter lang og veier 630 kg. Når ERA kommer frem til Den internasjonale romstasjonen (ISS), vil den operere fra den russiske Flerfunksjons-laboratorieseksjonen (MLM). Ved hjelp av syv ledd samt en lang rekke verktøy og atskillig elektronikk kan dette astronaut-hjelpemiddelet bevege seg omkring på de russiske romstasjon-segmentene og utføre mange oppgaver.
ESAs ERA-prosjektleder Philippe Schoonejans: «ERA kan styres fra den russiske luftslusen. Dette betyr at astronautene ikke lenger trenger å forlate romstasjonen for å installere visse typer utstyr. Ved hjelp av videokameraer kan armen inspisere utsiden av stasjonen, flytte eksperimentutstyr og forsyninger, og til og med benyttes som løftekran.»

Kuipers prøvde ut ERAs WET (Weightless Environmental Test) modell. Denne modellen ble bygget i 1998 av et selskapskonsortium ledet av Dutch Space i Nederland. Planen var at ERA skulle skytes opp med romfergen i 2001, men av forskjellige grunner ble oppskytingen utsatt. I sommer ble det besluttet at robotarmen skulle skytes opp i november 2007 om bord i en russisk Proton-rakett sammen med MLM.
Hardt arbeid

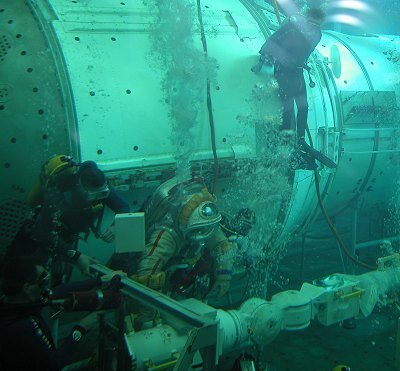
Det er imidlertid mye som må gjøres før den tid. I forrige uke ble WET-modellen demontert og satt sammen igjen under en undervannsøvelse ledet av Kuipers. Sammen med russiske Dmitry Verba kontrollerte Kuipers også en manuell styring, som skal være reserveløsninger for det automatiserte systemet. «Øvelsen bestod av mye hardt arbeid og krevde tålmodighet,» sier den nederlandske astronauten. «Vi måtte utføre mange dreiebevegelser for å betjene armen manuelt, ingen enkel oppgave under vann.»
Armen fungerte bra, selv om Schoonejans konkluderte med at noen forbedringer bør gjøres. Kuipers måtte bruke begge hendene eller be Verba om hjelp for å utføre enkelte énhåndsoperasjoner, fordi astronauten ikke hadde noen mulighet til å stabilisere seg. En mobil festemekanisme kan være en mulig løsning på dette problemet. Et fastnøkkelsett må også endres fordi nøklene hele tiden løsnet under tiltrekking av bolter, noe som er unødvendig sløsing med verdifull tid. Isolasjonsmateriale som iblant forstyrret videokameraene, må også festes bedre.
Finjustering
I året som kommer, vil det russiske firmaet Energia og de europeiske samarbeidspartnerne som bygget ERA arbeide med å finjustere robotarmen. Fra midten av 2006, når nye prosedyrer er utarbeidet, vil mannskapene på fremtidige romstasjon-ekspedisjoner for første gang få ERA-opplæring. De vil være helt fortrolige med ERA før oppskytingen i 2007.

