Jules Verne ATV - Hull på tre slag i rommet
Jules Verne ATV er klar for Europas aller første automatiske dokking i rommet. Den siste "putten" må være mer nøyaktig og forsiktig enn på noen golfbane.
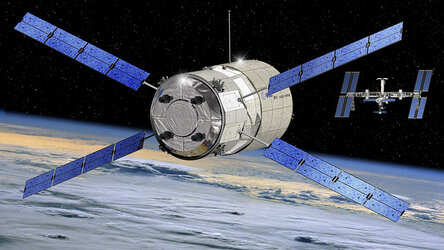
For øyeblikket er ATV "parkert" i bane 2000 meter foran den internasjonale romstasjonen (International Space Station, ISS). Om ikke så alt for lenge vil ATVs kontrollsenter ta fartøyet gjennom to viktige prøvedokkinger.
Disse vil føre forsyningsfartøyet nærmere og nærmere romstasjonen før den endelige dokkingen 3. april 2008.
ATVs kontrollsenter - perfekt teamwork
Forestill deg alle musklene, senene, nervene og knoklene i en golfspillers kropp som må jobbe sammen i perfekt koordinasjon og timing for å få ballen til å trille ned i hullet.
Det samme er nødvendig for å få ATV til å møte og dokke med romstasjonen. Et stort antall mennesker, datamaskiner, nettverk og systemer må arbeide sammen tett – med brøkdelen av et sekunds timing – for å sørge for at den siste delen av Jules Vernes reise skjer feilfritt.

Utfordringen er enorm. Et vellykket første forsøk vil avhenge av et svært tett samarbeid, en fantastisk koordinering og en superb kunnskap om romfartøyet og dets kompliserte styringssystemer.
"Romfartøyet fungerer perfekt og mannskapet på kontrollsenteret er svært godt trent. Vi gleder oss til et vellykket første dokkingsforsøk den 3. april 2008. Det blir komplisert, men etter en vellykket oppskytning, tidlig fase i rommet og overføring til parkeringsbane, har hele gruppen her på bakken full tillit til seg selv og Jules Verne," sier Alberto Novelli, ESAs Mission Director ved ATVs kontrollsenter (ATV-CC) i Toulouse i Frankrike.
ATVs automatiske manøver for å unngå kollisjoner (Collision Avoidance Manoeuvre, CAM), gjennomgikk en vellykket test i rommet 14. mars 2008. Andre deler av det sofistikerte dokkingssystemet vil bli utprøvd i løpet av to testdager den 29. og 31. mars 2008.
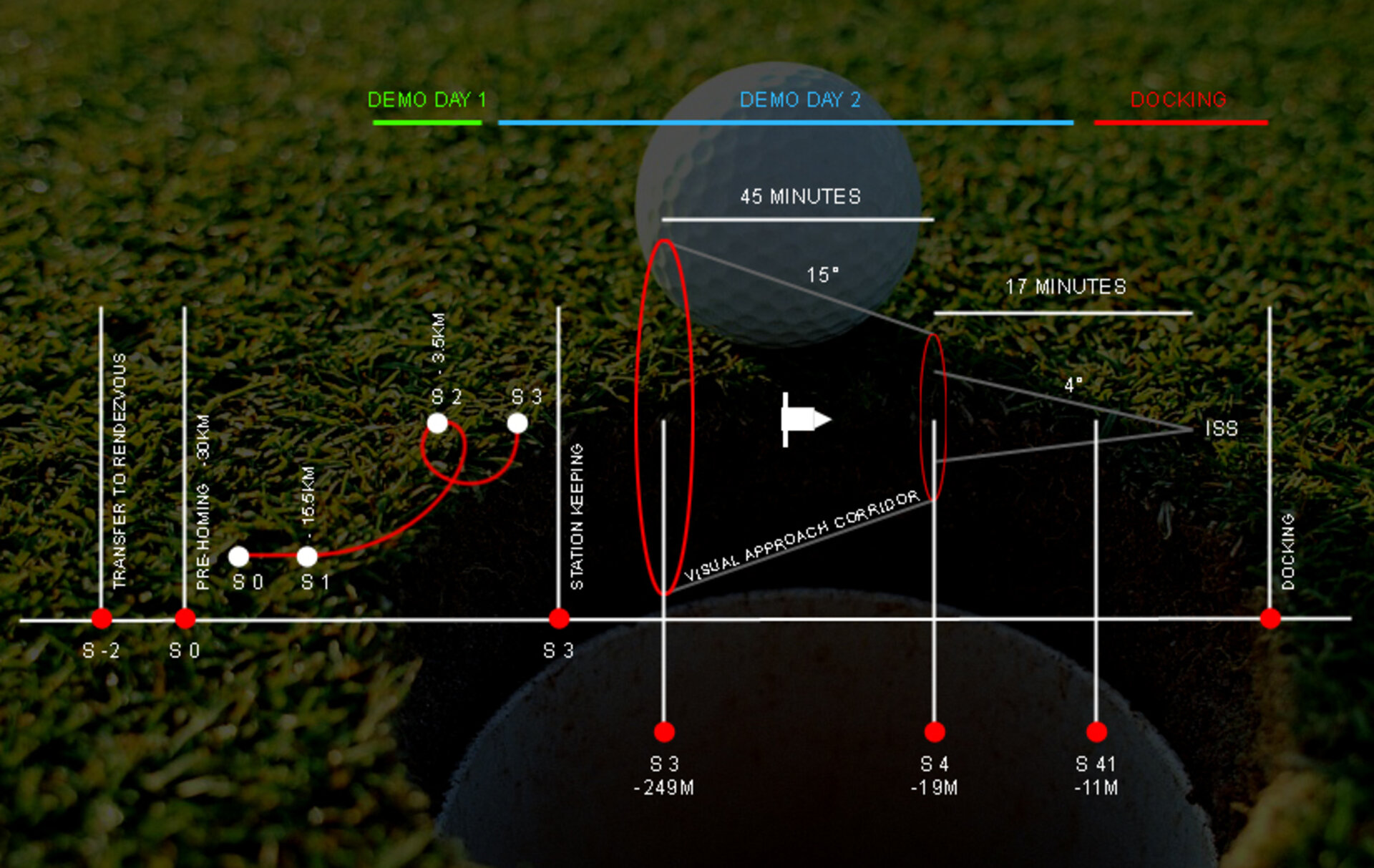
ATV vil da manøvrere seg gjennom en serie med kontrollpunkter kalt S-1, S0, S1, S2 og så videre i nærheten av romstasjonen. Disse punktene vil utgjøre en kompleks serie av baner og soner.
Merk at alle tidspunktene er midlertidige og kan bli endret.
Testdag 1 – 29. mars – klokken 15:19 norsk tid
Hovedformålet med testdag 1 er å prøve ut ATVs navigasjonssystem. Testen vil bli styrt fra ATVs kontrollsenter.
Utprøvingen skal vise at ATV kan navigere i forhold til ISS, og at den ved hjelp av GPS kan manøvrere seg til kontrollpunkt S2. Dette kontrollpunktet befinner seg i den samme banehøyden som romstasjonen, men 3500 meter lenger bak.
Resultatene av testdag 1 vil bli vurdert av ESAs JADOR-gruppe ((Jules Verne ATV Demonstration Objectives Report, JADOR) og sendt videre til ISS-kontrollsenteret. Etter vurdering og tillatelse til å fortsette den 30. mars 2008, går ATV videre til testdag nummer 2.
Testdag 2 – 31. march 2008 – klokken 14.46 norsk tid

Hovedformålet med testdag 2 er å prøve ut ATVs sensorer og navigasjonssystem ved manøvrering nær romstasjonen. Testen vil også omfatte nødprosedyrer gitt av ATVs kontrollsenter og mannskapet om bord på ISS.
ATV vil bli bedt om å dra nær S4, 12 meter fra dokkeporten til Zvezda, den russiske servicemodulen, og så flytte seg tilbake til S4. Til slutt vil ATV bli gitt en fluktkommando som vil ta fartøyet bort fra og rundt ISS og tilbake til kontrollpunkt S1.
Når ATV har blitt vurdert for å være helt klart for dokking, vil det forsøket skje 3. april 2008.
Dokking – 3. april 2008 – klokken 16.41 norsk tid
Dokkeprosedyren vil begynne klokken 13.44 norsk tid. ATV vil starte fra kontrollpunkt S3, 250 meter borte fra romstasjonen. ATVs datamaskiner vil bruke både et videometer og et telegonimeter for å dokke automatisk.
Når ATV er et par meter borte fra den russiske modulen, vil forsyningsfartøyet senke farten ned til 7 centimeter per sekund. Kontrollørene i Toulouse vil dirigere ATV langs en forhåndsbestemt rute helt til forsyningsfartøyet er vel fremme.
Før dokkingen finner sted vil ATVs kontrollsenter også be det russiske kontrollsenteret i Moskva (Mission Control Centre in Moscow, MCC-M) om tillatelse til å dokke.
Astronautene ombord på romstasjonen vil være dypt involvert i alle stadiene i prosessen. De vil ha som oppgave å kontrollere og overvåke ATV på testdag 1 og 2 og under dokkingen. Mannskapet skal også forberede den russiske modulen for dokking.
Skulle det bli nødvendig, har astronautene også muligheten til å kommandere ATV til å avbryte, stoppe eller pause dokkingen. De kan også få forsyningsfartøyet til å fly bort fra romstasjonen eller dra tilbake til dets forrige kontrollpunkt.