

OasISS mission milestones
STS-127 (2J/A) Space Shuttle Endeavour: Kibo Laboratory External Platform (15-31 July 2009)
After ESA astronaut Frank De Winne arrived on the International Space Station, the first change to the Station assembly occurred as part of the 2J/A flight on STS-127 with Space Shuttle Endeavour. This mission installed the external platform on the Japanese Kibo Laboratory. The STS-127 mission also exchanged Koichi Wakata for Timothy Kopra as Expedition 20 Flight Engineer.
STS-128 (17A) Space Shuttle Discovery: Multi-Purpose Logistics Module (29 August - 12 September 2009)
The STS-128 mission once again united two ESA astronauts on the International Space Station at the same time. Frank De Winne was joined by Swedish ESA astronaut Christer Fuglesang, who was a Mission Specialist for STS-128 and made two spacewalks for the mission. STS-128 was launched 29 August 2009.
STS-128 (assembly flight 17A) was principally a logistics mission and brought one of the European-built Multi-Purpose Logistics Modules to the International Space Station. These pressurised cargo carriers were transported to the Station in the Shuttle’s cargo bay. The mission also exchanged NASA astronaut Timothy Kopra for NASA astronaut Nicole Stott as Expedition 20 Flight Engineer.
H-II Transfer Vehicle (HTV) (11 September 2009 Japanese time - 10 September European time)
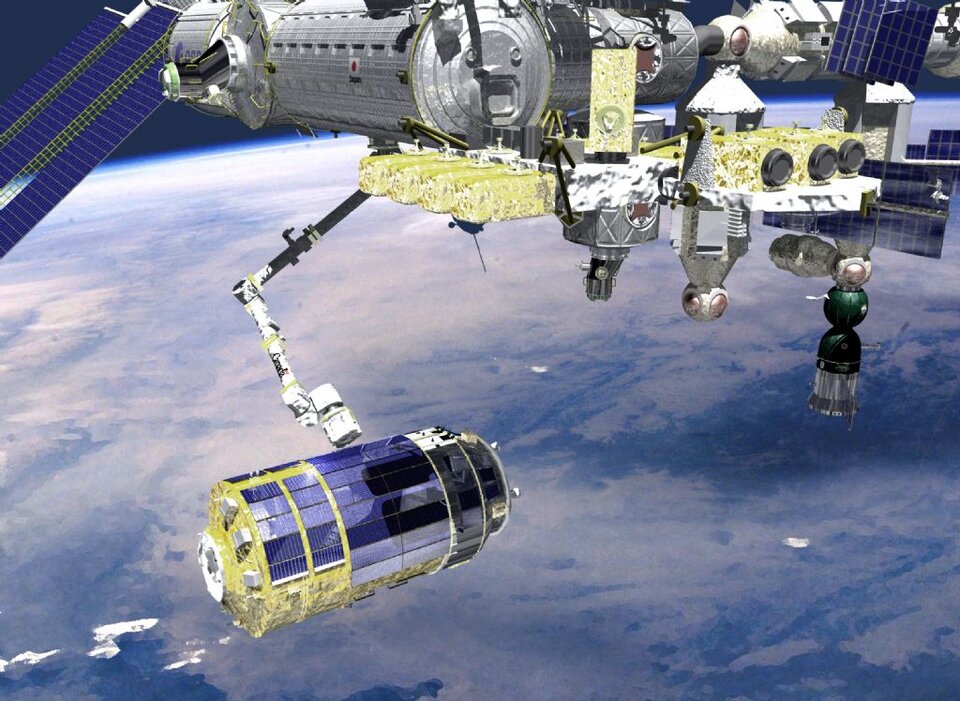
During the OasISS mission the Japanese Aerospace Exploration Agency (JAXA) launched the first H-II Transfer Vehicle, or HTV, to the International Space Station.
HTV is an unmanned logistics vehicle, like the European Automated Transfer Vehicle (ATV) or Russian Progress spacecraft. HTVs bring up to six tonnes of supplies and equipment to the Space Station as well as helping to remove any waste or unwanted equipment from the Station.
ESA astronaut Frank De Winne was one of the operators of the Space Station Remote Manipulator System (the Station’s robotic arm) used to capture the HTV. The robotic arm was used to berth HTV to the European-built Node 2 module in the same way that the European-built Multi-Purpose Logistics Modules are docked to the Station from the Shuttle's cargo bay.
Soyuz TMA-16 (20S) (30 September 2009)
Launched on 30 September 2009 from the Baikonur Cosmodrome, Soyuz TMA-16 as Space Station Flight 20S carrying NASA astronaut Jeffrey Williams, Roscosmos cosmonaut Maxim Surayev and spaceflight participant Guy Laliberté.
On arrival at the Station, Jeffrey and Maxim become Flight Engineers for the six-strong Expedition 21 crew under the command of Frank De Winne. They remained on the Space Station after Frank’s departure, with Jeffrey taking over as Space Station commander for Expedition 22.
Progress 34/35 (24 July/15 Oct 2009)
During the OasISS mission two Russian Progress logistics flights were launched, bringing necessary supplies and equipment to the International Space Station.
Progress 34P launched from Baikonur Cosmodrome in Kazakhstan on 24 July 2009. Progress 35P launched from Baikonur Cosmodrome on 15 October 2009.
Once at the Station Progress supply spacecrafts are gradually filled with waste and equipment that are no longer needed to be burnt up in the Earth’s atmosphere following undocking at the end of the their mission.
To this end Progress 33P undocked from the International Space Station during the OasISS mission on 30 June 2009.
Mini Research Module 2/Soyuz-U (10 November 2009)
Just prior to Frank’s departure from the Station the Russian Mini Research Module 2 was launched by a Russian Soyuz-U launcher. Launch occured 10 November, with docking two days later.
Once Mini Research Module 2 arrived at the Space Station it was docked to the zenith port of the Zvezda Service Module’s transfer compartment i.e. the port facing away from Earth when the International Space Station is in its normal orbital flight profile.
The Mini Research Module 2 has two primary functions. It serves as a docking port for the docking of the Soyuz and Progress transport and cargo vehicles to the Station. This is advantageous in light of increased Russian Soyuz/Progress launches due to an increase to a six-member crew. Secondly the new module takes over as primary Russian airlock from Pirs for spacewalks by two Station crewmembers using Russian Orlan spacesuits.