
Active Road Management Assisted by Satellite (ARMAS)
Introduction
The European Space Agency is working with Portuguese organisations on how space technology can improve road safety. Each year in Europe, 40 000 people die and 1 700 000 are injured in road accidents. Statistics show that one in three Europeans will become road accident victims during the course of their lifetime. These appalling figures are from the European Commission’s White Paper “European Transport policy for 2010: time to decide”. Europe is looking at ways to lower these tragic figures, and in the European Union regulations based on road traffic surveillance via satellite are now under consideration.
A new system is currently under development in Portugal that may bring about changes on several levels. The project called Active Road Management Assisted by Satellite (ARMAS), is a system for monitoring vehicles via satellite based on the European Geostationary Navigation Overlay Service (EGNOS). EGNOS works by enhancing the data provided by the US GPS system, offering greater precision and signal continuity.
Objectives
The major objectives of ARMAS Phase I was to come to a definition of the ARMAS prototype including institutional, legal and safety aspects.
The major objectives of ARMAS Phase II are to perform live demonstrations that are able to show and prove the various concepts inherent to the ARMAS project in the areas of Road Safety, Traffic Management and Virtual Tolling, by demonstrating the following functionalities:
- Tolling Based on using Satellite Positioning on Highways and Urban Areas (Zone Tolling)
- “Warnings Provision”
- “SOS Request”
Applications
The main applications of ARMAS are going to be in the Road domain (Urban and Highways), with particular interest in tolling based on Satellite Positioning.
Technical Information

During Phase I real time tests were conducted on the Vasco Da Gama Bridge above the Tagus, one of the longest bridges in Europe.
A receiver located inside the vehicle calculates its position in real time and enables information to be exchanged with a regional control centre.

The first benefit is the implementation of virtual tolling with remote payment of toll charges. Stopping is no longer necessary: inside the vehicle the driver is informed that he is passing through the toll, and at the same time the control centre records the vehicle and will then be able to bill it. The result is time saved and an end to the dangerous traffic queues that occur at tollbooths. Virtual Tolling is a major step for implementing a Europe-wide electronic tolling system that allows citizens to travel without physical barriers inside the European Union.
The system also allows the vehicle to send back information about problems that may occur while travelling. An S.O.S. alarm can be sent in an emergency. The signal appears on a screen in the control centre which can send assistance immediately as it knows the exact location of the vehicle. It is also possible to alert nearby motorists to slow down.
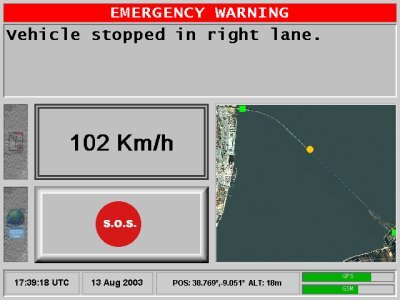
In the same way drivers can be notified of incidents they are likely to encounter on their journey, with the problem being posted on the inside screen and through sound messages, providing a prior alert of the location of the road event that enables the driver to take the necessary measures to avoid the hazard (tailbacks, lane changes and so on).
This is one example of real time traffic management that should help accident prevention. ARMAS could later be applied to all road networks.
Other uses being developed are Obstacle Detection & Avoidance and Intelligent Speed Advice & Enforcement. All these functionalities are made possible through the use of the EGNOS signal (reliability, accuracy increase and continuity) – and in the future of Galileo.
Schedule
The ARMAS project started in April 2003 and the preliminary design was completed by November 2003. System Development and Testing is taking place, and a demonstration will take place in September 2005. The project is expected to end in February 2006.
Consortium
ARMAS has been developed by the European Space Agency in partnership with the Portuguese companies Skysoft and INOV and with the support of Auto-Estradas do Atlântico and Lusoponte.
A list of Partners and their nationality follows below:
- Skysoft Portugal (POR)
- SetCom Portugal (POR)
- Auto-Estradas do Atlântico (POR)
- Lusoponte (POR)
- Brisa (POR)
- Mapflow (IRL)
- LogicaCMG (NL)
- IDMEC (POR)
- Delphi GRUNDIG (POR)
- PT Inovação and TMN (POR)
Contact points
João Canário, joao.canario@skysoft.pt
Michel Tossaint, Michel.Tossaint@esa.int



