
SPEAR
The principal objectives of the SPEAR (Servo & Power Electronics for Automation and Robotics) activity were:
- to develop a low cost power pack specifically designed for a space robot controller, implementing the function of servoamplifier for a space manipulator arm;
- to ensure SPEAR compatibility for use with the SPIDER arm - developed by an italian industrial team under a contract of the Italian Space Agency - in an extravehicular flight experiment
- to achieve a very high level of unit's compactness (i.e. low volume and mass)
The development of SPEAR was performed by an industrial team composed by Tecnospazio (I), as prime contractor, DASA (D), Phase Motion Control (I) and Hymec (NL). The activity was funded by ESA with a GSTP contract.
SPEAR main features
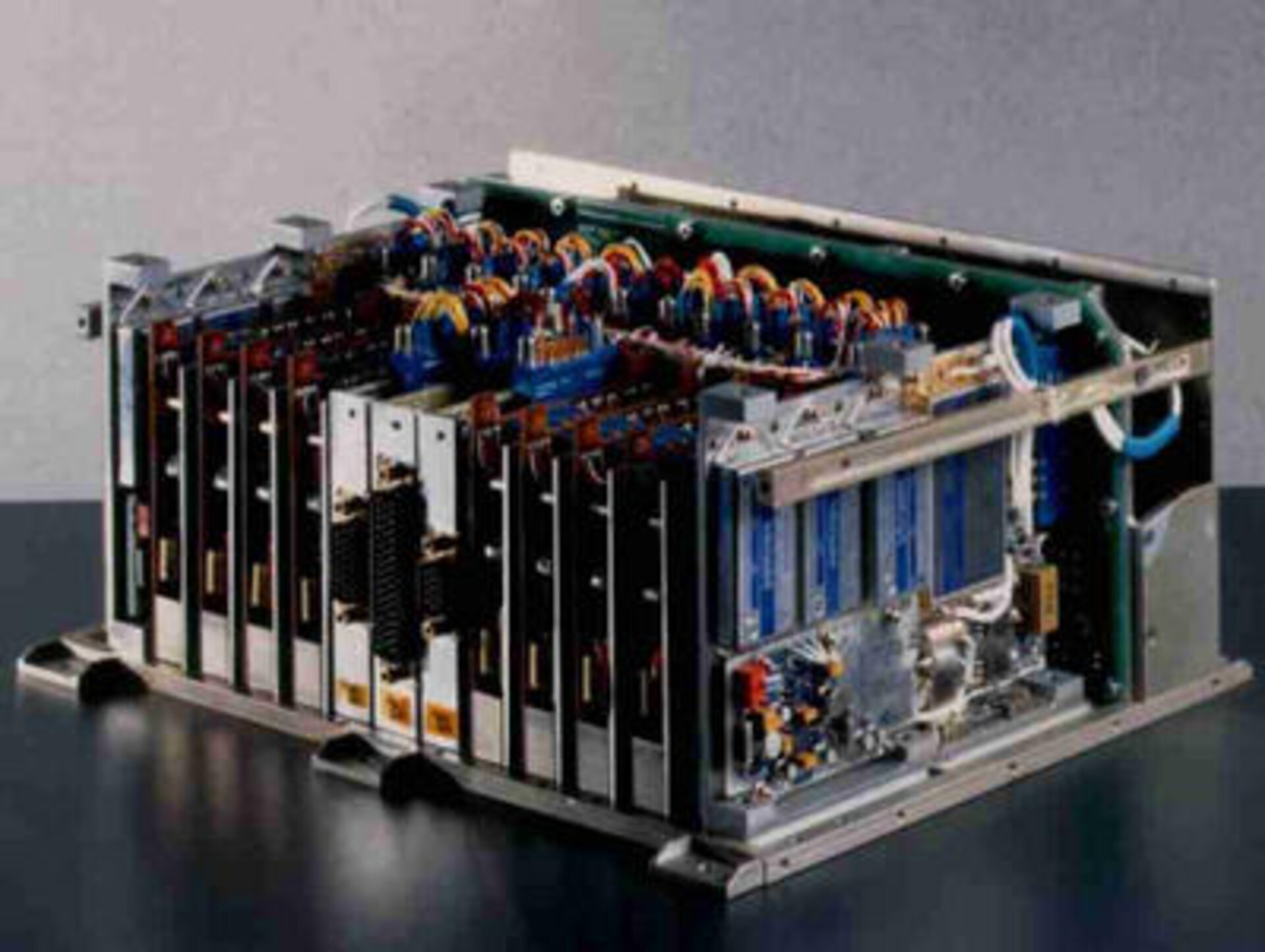
the main features of the developed unit are:
- capability to drive simultaneously up to 8 DC brushless motors (3A nom. current, 5A peak), either biphase or three-phase;
- operation in nominal mode, with SPEAR unit "driven" by the Robotic Controller;
- operation in non-nominal mode through external commands generated by an operator, which guarantees the basic functionalities (i.e. driving one motor at a time). This mode of operation is intended to recover the arm in case of robotic controller non-availability;
- autonomous thermal control (only heating, 10 heaters controlled by 4 redundant thermostats);
- operation in a space extravehicular environment with temperature ranging from -20°C to +60°C; non operative temperature between -55°C to 80°C; dimensions: 314mm x 256 mm x 132.7 mm;
- mass: 7980 g.
The unit was subject to functional, vibration and thermal vacuum tests. A preliminary integration with the SPIDER arm was also successfully performed.