
Hand Controller Device
| 613 - Abstract: |
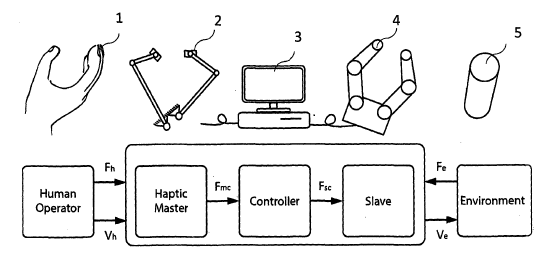
| The European Space Agency has developed a novel hand controller device. It is differentiated by the fact that the sensor and control pathways have been separated enabling an improvement in the quality of the force feedback, and greater sensing of hand and finger locations for dexterous remote handling. This is achieved while reducing the mechanical complexity, overall mass and volume of the device. Licensing agreements are sought. |
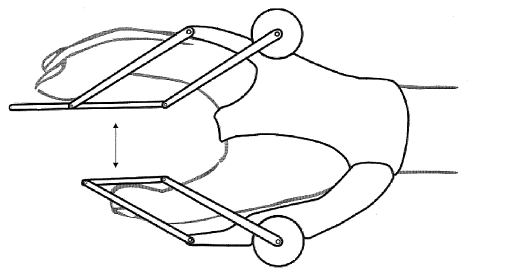
A highly flexible hand controller device with a human-centric design has been developed. It is comprised of a hand support that has position and force sensors on the fingers and thumb of the device allowing for dexterous movement of a slave robotic hand.
Force feedback is received from the slave hand to the fingers providing the operator with a greater degree of controllability. The control and feedback sensory channels are separated which allows for a higher ratio of performance versus resource expended when compared to other products on or near the market.
The controller can be greatly customized to suit the particular robotic hand that it is controlling. These hands can vary from simple parallel jaw grippers all the way through to complex mechatronic hands. To suit the degree of controllability required there are a variety of different finger combinations possible. For simple grippers often just a thumb and forefinger arrangement is sufficient. However, for the more complex hands, different numbers of fingers in conjunction with a thumb are available.

The controller has been designed so that many different operators with differing hand sizes can use it. This is possible due to the fact that the finger sensors cover quite a large area meaning that the fingertips can rest at any point.
A prototype has already been produced and tested so can easily be demonstrated to any organizations looking to incorporate the controller into their systems.
Innovations and advantages
- Human-centric design – fits any size of hand.
- Resource efficient due to separation of control and feedback pathways.
- Can control a wide variety of slave robotic hands.
- Customizable design dependent on level of controllability required.
- Relatively simple design
Domain of application
It can be used to control robots in environments that are not suitable for humans:
- Underwater
- Nuclear areas
- War zones
- Natural disasters
- Oil & gas
- Chemical handling
There are also applications in:
- General remote handling
- Medical – surgery, training, rehibilitation
- Video gaming controller
