
Machine Learning Corrections for Improved Positioning Accuracy
| 775 - Abstract: |
| The present invention concerns a method that exploits machine learning (ML) algorithm to improve the accuracy of the positioning of Global Navigation Satellite System (GNSS) receivers, by means of analysis of the Position, Velocity, Time (PVT) solution. Any positioning engine, including commercial ones, could benefit from this invention. ESA is looking for partners who would be interested in licensing and implementing this patent. |
Description:
GNSS receivers are prone to positioning errors due to multipath. When a GNSS receiver tracks a multipath ray, e.g., a reflection of a signal on a closely building, it erroneously estimates the distance from the transmitting satellite. This phenomena is present particularly in urban environment, where less line-of-sight (LoS) are available and several signals used are potentially multipath signals.
Several technical solutions have been investigated in order to mitigate the problem, including signal design that offer a better multipath rejection at system side; and dedicated signal-processing techniques at receiver side. The main drawbacks of these approaches is an increase of the complexity, and hence the cost, of the receiver.
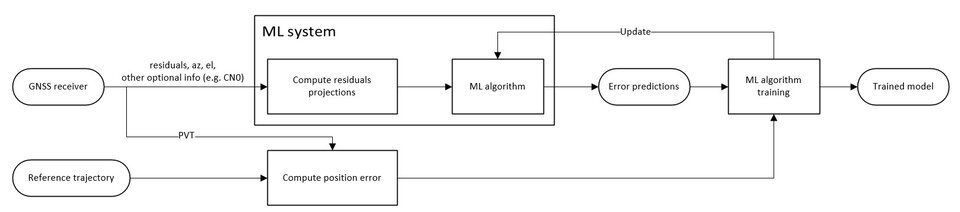
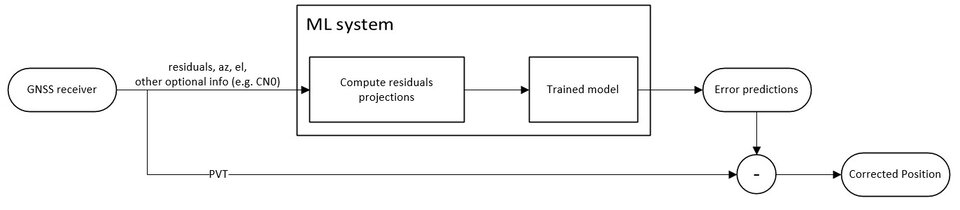
The main idea of the invention is to use the information already available in the GNSS receivers, to create a ML model to be used after the positioning engine. This model estimates the positioning error exploiting the post-fit residuals/innovations and applies a correction to the PVT in order to compensate this error. The receiver still needs to receive the corrections from the trained model, but this model can be build based on GNSS results only. The ML regression acts as a sort of “adaptive filter”, able to cope with different environmental conditions automatically, adjusting properly the estimated position with a 3D error compensation. The ML feedback aims to map the directional pseudorange residuals to a 3D correction of the computed PVT.
Normally, a GNSS receiver computes an estimation of its position by measuring the distance from at least four satellites. The signals contains information on the satellites position and the transmission time, according to the system time. The receiver registers the reception time, according to its local reference clock, and then estimates the distance by computing the propagation time. This distance estimation is usually referred to as pseudo-range as it includes the geometric range, plus several errors sources. For instance, synchronization error between the local reference clock and the system time, atmospheric effects, and multipath.
The position computation is usually performed by solving the navigation equations using a Weighted Least Square Solution (WLS), and often processed by a Kalman filter. Due to the errors embedded in the pseudoranges, the solution provides a best-fit position, which in general does not correspond to the input pseudoranges. The difference between the measurements and the a-posteriori estimation is usually referred to as residual. This can be either the innovation residual if Kalman filter is used, or the pseudorange residual if LS/WLS is used.
The idea of the presented invention is to use the residuals to train a ML model capable of predicting the positioning error (2D or 3D). This information is already present in the GNSS receivers; therefore, it does not require additional complexity on the positioning engine.
Figure 1 and Figure 2 present the detailed system architecture for the training phase and the usage phase.
A proof of concept has been realized based on data collected from GNSS mass market test campaigns, verifying the results on two positioning engines.
Innovations and advantages:
- This invention can be integrated in the current generation of receivers at software level, without requiring a hardware revision. It can even be deployed as a third party service for the receivers that provide some basic additional information on top of the PVT.
- Computationally simple
- It can work in standalone mode, no need for internet connection.
Domain of application:
The invention can be used for terrestrial location based service, which can experience improved accuracy of the position and could readily be exploited by the European industry, since it only requires data collection and software development.