
European Robotic Arm
It is much like a human arm. It has an elbow, shoulders and even wrists. The European Robotic Arm (ERA) is the first robot able to ‘walk’ around the Russian segment of the International Space Station.
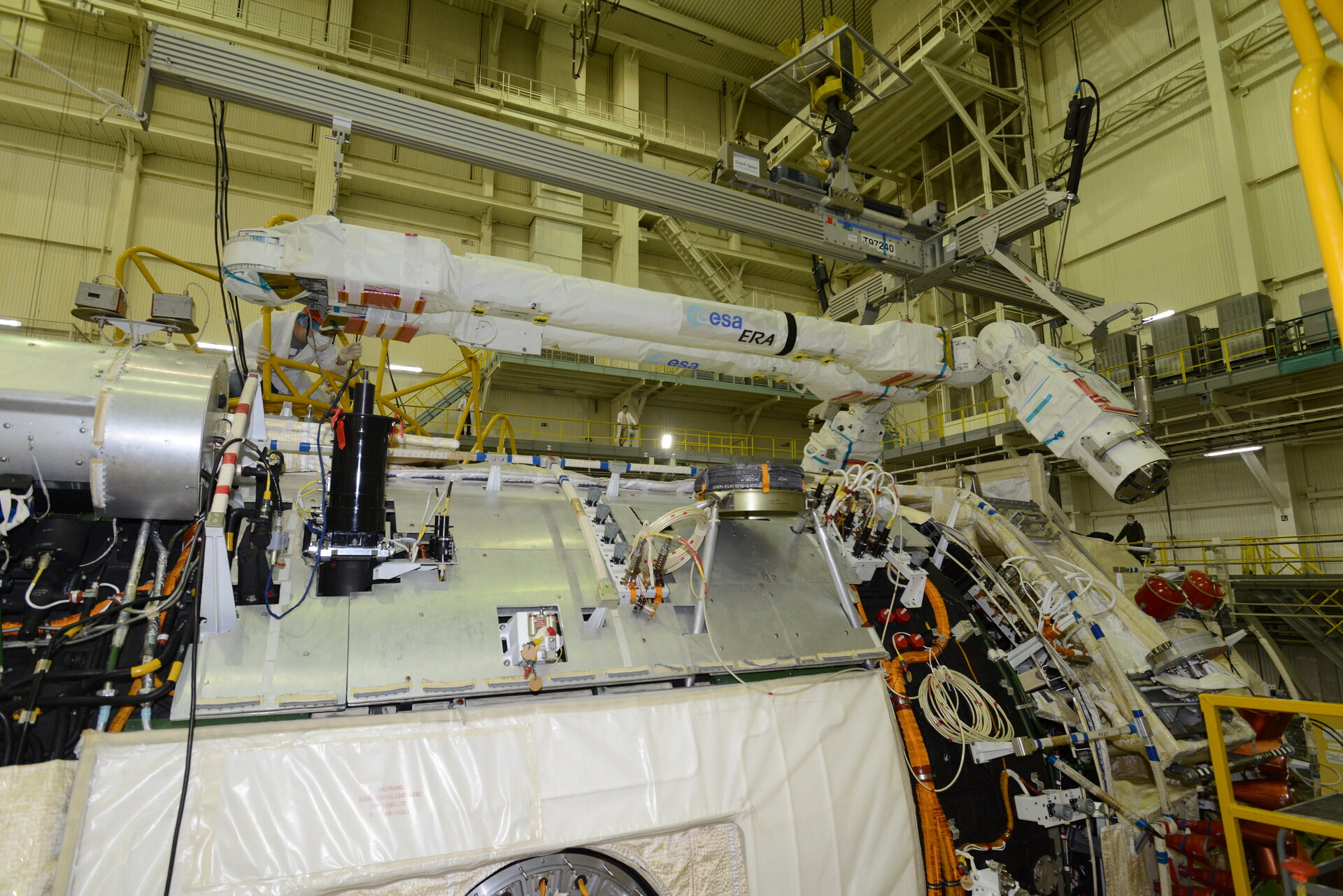
Light yet powerful, the orbital arm has the ability to anchor itself to the Station and move back and forward by itself, hand-over-hand between fixed base-points. This space robot looks like a pair of compasses and has a length of over 11 m. When stretched, it could pass a football from a penalty spot to the goalkeeper.
The robot will serve as main manipulator on the Russian part of the Space Station. Its seven joints can handle multi-tonne payloads with a large range of motion for assembly tasks.

The arm and its two control stations – one for inside and another for outside the orbital outpost – will be launched into space together with the Multipurpose Laboratory Module, called ‘Nauka’, from the Baikonur Cosmodrome, in Kazakhstan, on a Russian Proton rocket. The launch was set for 21 July 2021, after two decades of technical and programmatic challenges.
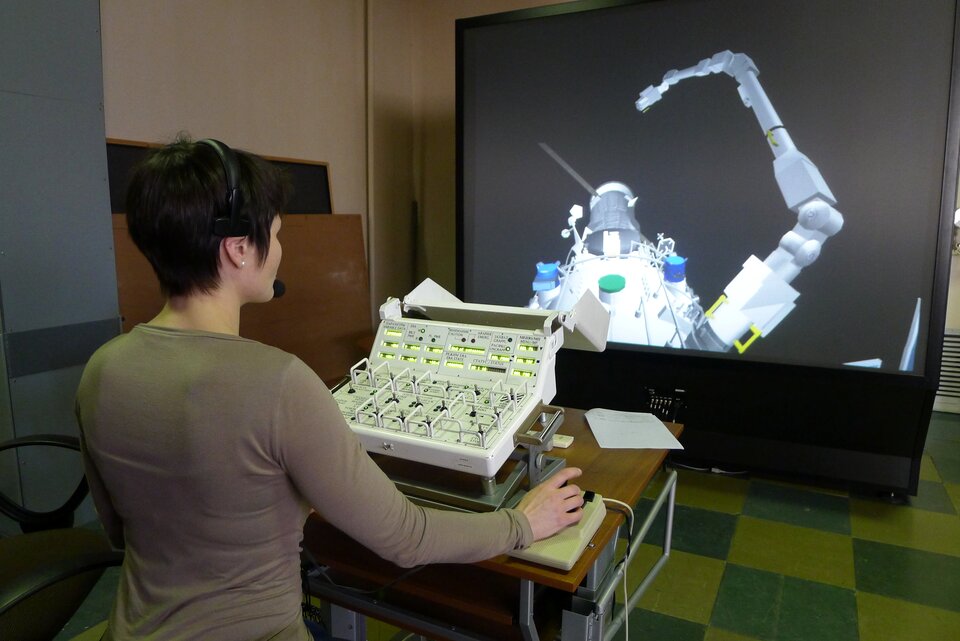
The robotic arm brings new ways of operating automated machines to the orbital complex. ERA has the ability to perform many tasks automatically or semi-automatically, can be directed either from inside or outside the Station, and it can be controlled in real time or preprogrammed.



Once it starts working from its home base at the Russian Multipurpose Laboratory Module the robot arm can help install, deploy and replace elements in outer space.
ERA’s first tasks in orbit, after deployment and checkouts, are to set up the airlock and install a radiator for the latest module of the Space Station.
Astronauts will use the robotic arm to save time and effort in Space Station maintenance. It will act as a tool to transfer small payloads directly from inside to outside the International Space Station without the need for spacewalks, but will also help spacewalkers by transporting them around like a cherry-picker crane. Its four infrared cameras will support inspections and operations outside the Space Station.
Why ERA?

The International Space Station already features two robotic arms: Canadarm2 and the Japanese Experiment Module Remote Manipulator System. Both play a crucial role in berthing visiting vehicles and grappling external payloads on the US and Japanese modules.
However, the Canadian and Japanese arms cannot reach the Russian segment of the International Space Station. The different types of base points and payload mounting units do not allow to operate them in other parts of the Station.
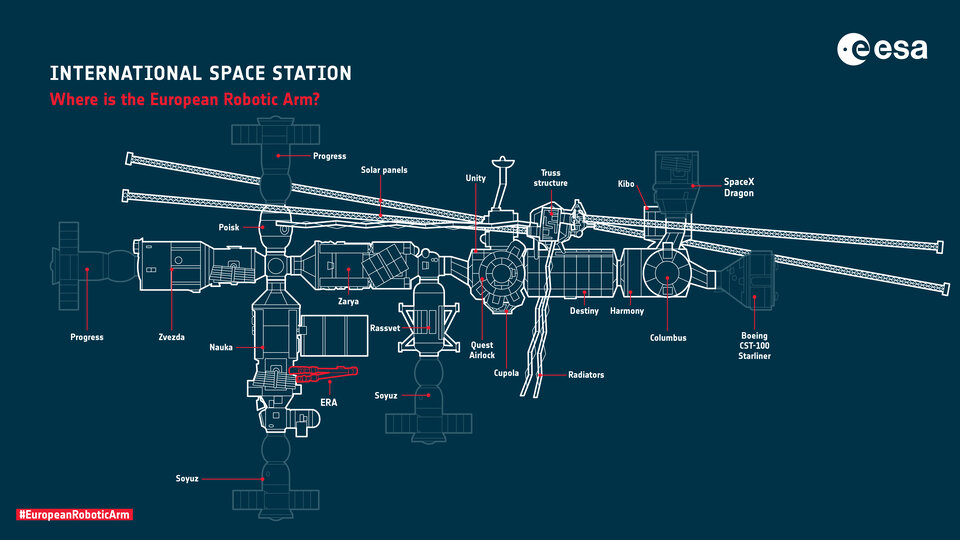
ERA comes to the stage to service the Russian segment. Even though the Multipurpose Laboratory Module will be its home base, ERA’s design and flexibility provide the freedom to move hand-over-hand around the Russian parts of the Station. It will supplement the two ‘Strela’ cargo cranes
Facts and figures
- ERA’s 11 m structure can manoeuvre 8-tonne payloads.
- It is a true autonomous robot, fully programmable.
- It can be operated by the crew from both inside and outside the Space Station.
- It teleoperates with an accuracy of 5 mm.
- It is designed to cope with the hazards of outer space.
- It is reversible – a hand can become a shoulder, and vice versa.
More about the smart spacewalker
Download this media kit to learn more about the European Robotic Arm. The online brochure is available in English, Dutch and Russian.
If you prefer to print it or want to scan through it more easily from your mobile, here are the links to the English, Dutch and Russian printable versions.