Scanning and observing
This page is a continuation of 'Scanning and observing'
Light curve observations

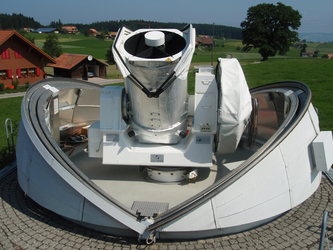
Interesting observations on the brightness variation of larger objects can be acquired from optical telescopes.
ESA collaborates with observatories such as the Zimmerwald observatory in Switzerland to maintain a large sample of light curves and their related variations over time, and reports on these light-curve variations as part of international collaboration.
The proposal to support contingency situations for functioning spacecraft through a collaborative acquisition of data, and derived robust interpretation of the acquired data, is under study.
Laser ranging to non-cooperative objects
ESA is studying the contributions of satellite laser ranging (SLR) to non-cooperative objects – intact satellites and debris objects not carrying a retroreflector.
The studies focus on the support of operational needs, such as collision avoidance and improving reentry predictions, resolving contingency situations, and, potentially, future contributions to active debris removal missions.
Today, laser-ranging technology and sensor networks are very promising and evolving rapidly. Collaborations are in place with SLR stations in Europe, such as those at Graz, Wettzell and Zimmerwald.
Retrieving hardware for hypervelocity impact studies

ESA also gains information on the small, submillimetre meteoroid and space-debris environment through the analysis of retrieved space hardware, such as the Eureca satellite, and the three solar arrays retrieved from the Hubble Space Telescope via the Space Shuttle.
The total exposed surface that was analysed exceeded 300 sq m. The samples contained several thousand impact craters from a few 0.001 mm up to 7 mm in diameter.
An analysis of chemical residues in the craters allowed a discrimination of possible sources of the impacting objects (see the Meteoroids and Debris site for more information).
Debris sensors in orbit
For orbits above 600 km, and for inclinations outside the capability of current technology, the retrieval of space hardware for assessment is not possible and active insitu space sensors are required to measure impact fluxes – that is, the rate of impacts per area across a volume of space.
In 1996, the ESA-funded Geostationary Orbit Impact Detector (GORID) experiment was launched into GEO on the Russian Ekspress2 satellite on 26 September 1996. The first impacts were detected on 3 November 1996.
During five years of operation, an average of 2.4 impacts/day were detected, with peak counts of 50 per day.
In 2001, the Debris inOrbit Evaluator (DEBIE) was launched into LEO on ESA’s Proba-1 satellite.
DEBIE used a combination of impact ionisation, momentum and foil-penetration detection for the active monitoring of submillimetre particles impacting on the detector surfaces. In 2008, DEBIE II was launched together with the Columbus science module, now docked to the International Space Station.
It is now operated via the European Technology Exposure Facility (EUTEF), one of the external Columbus payloads.
Simulating space-debris observations
Debris environment models require measurement data from well-defined regions in space – at specific observation times – to validate their predictions. On the other hand, the data return from measurement campaigns can be optimised with respect to search regions, observation times and sensor sensitivity if some a priori information on the space-debris population is available.
To support the planning of observation campaigns and the exploitation of data for improved debris environment models, ESA has sponsored the development of software dubbed ‘Program for Radar and Optical Observations Forecasting’ (PROOF).
PROOF simulates space-debris observation campaigns for ground- and space-based sensors using available population data from the MASTER model. The simulation generates expected detection statistics and characteristics for given radar or telescope systems and for given campaign parameters.
Both monostatic and bistatic (radar transmitter and receiver are collocated or physically separated, respectively) configurations are supported. For catalogued objects, PROOF performs predictions of detections that allow a clear correlation of observations with catalogued objects.