

Pełzające po ścianach roboty-gekony potrafią przyczepiać się też w kosmosie
ESA wykazała, iż roboty trzymające się ścian niczym gekony mogą pracować zarówno w kosmosie, jak i na Ziemi. Tym samym przybliża się perspektywa, że w przyszłości pojazdy kosmiczne będą nadzorowane przez pełzające po ich powierzchni automaty.
Roboty pełzające po powłoce statków kosmicznych są częstym motywem w filmach science fiction, takich jak Niemy wyścig czy Wall-E. W rzeczywistości można zadać pytanie, jak mogą się one trzymać powierzchni i jednocześnie być mobilne? Naukowcy z ESA i kanadyjskiego Uniwersytetu Simona Frasera badali wpływ kosmicznych warunków (próżnia, zmiany temperatury) na różne materiały „przywierające na sucho”, inspirowane gekonami. Odkryli, że ich właściwości utrzymują się nawet w takich warunkach.
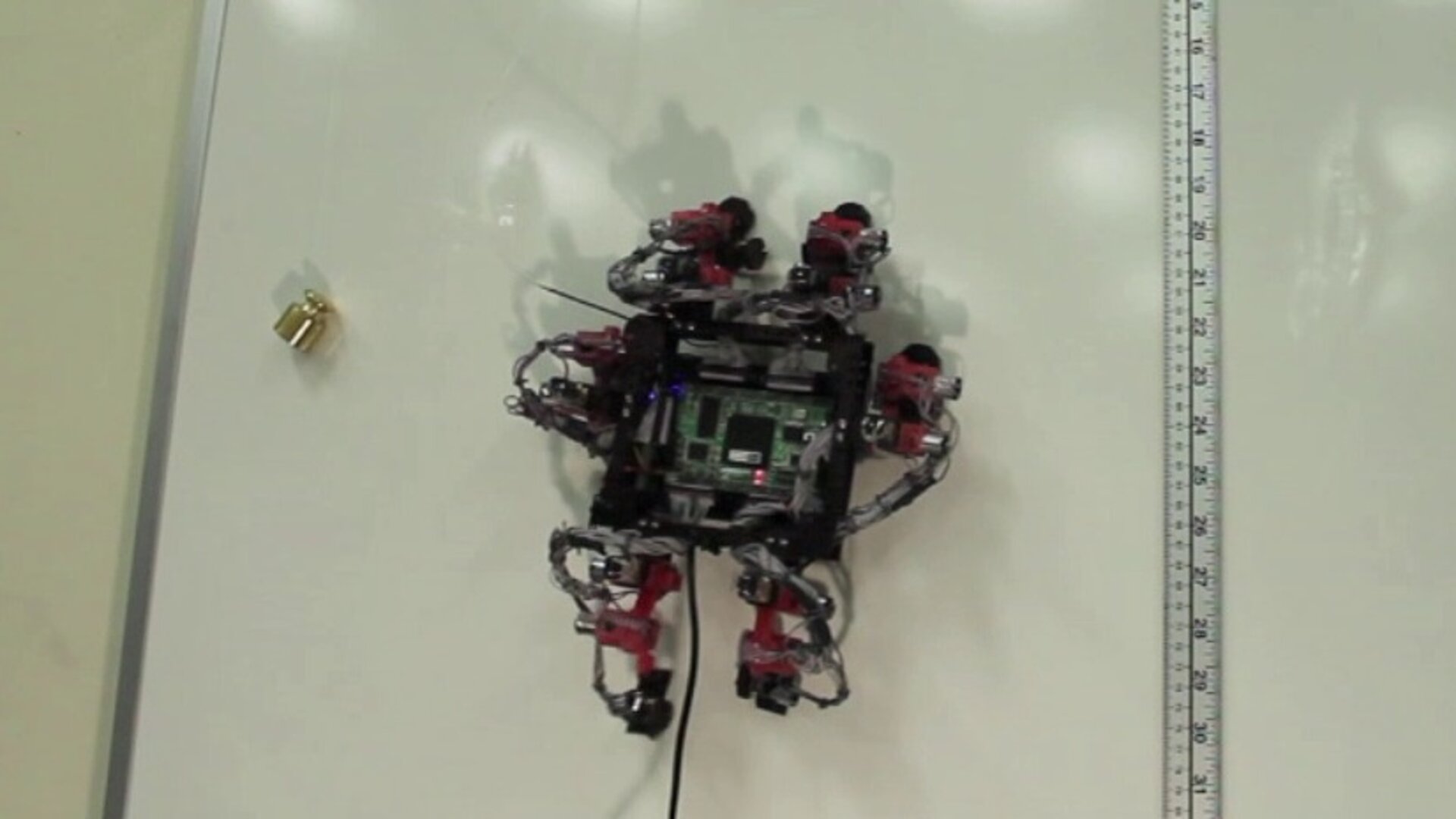
Inżynierowie ze School of Engineering Science Uniwersytetu Simona Frasera zademonstrowali taką przyczepność materiałów na rodzinie pełzających robotów „Abigaille″.

Access the video
„Takie podejście jest przykładem tzw. biomimikry, czyli korzystania z rozwiązań inżynieryjnych ze świata przyrody,” wyjaśnia Michael Henrey z Uniwersytetu Simona.
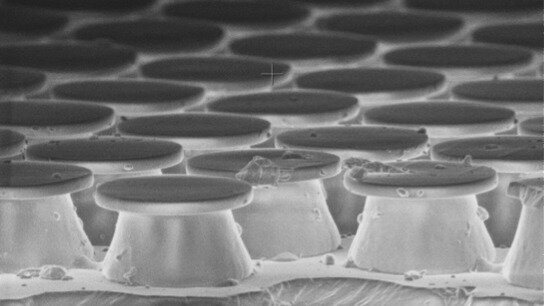
Stopy gekona przylegają dzięki malutkim włoskom o długości 100 do 200 nanometrów – mniej więcej skali pojedynczej bakterii. Są one wystarczające małe, aby zadziałały interakcje na poziomie atomowym między końcówkami włosów a powierzchnią.
„Użyliśmy technik z przemysłu mikroelektronicznego, aby stworzyć nasz wariant końcówek przylegających” powiedział Henrey. „Z uwagi na ograniczenia techniczne są one 100 razy większe, niż włoski gekona, ale to wystarczy, aby utrzymać wagę robota.”
Chcąc ocenić przydatność przyczepności materiału w zastosowaniach kosmicznych, Michael Henrey testował go w Laboratorium Materiałów i Procesów Elektrycznych, w należącym do ESA centrum ESTEC w holenderskim Noordwijk, przy dodatkowym wsparciu z Laboratorium Automatyki i Robotyki ESA.
„Jesteśmy zainteresowani materiałami przywierającymi na sucho, ponieważ inne wykorzystujące przylepność metody nie nadają się do warunków przestrzeni kosmicznej” dodaje Henrey.
„Wszelkiego rodzaju taśmy klejące zbierałyby zanieczyszczenia, tracąc z czasem przylepność. W warunkach próżni emitowałyby też opary, co jest dużym przeciwwskazaniem, bo mogłoby to wpłynąć na czułe systemy statku kosmicznego”.
„Rzepy wymagają przyczepnej powierzchni, zaś złamane haczyki mogłyby zanieczyścić środowisko pracy robota. Magnesy nie trzymają się zaś kompozytów, a pole magnetyczne mogłyby wpłynąć na wrażliwe przyrządy”
„Do dokładnej oceny przyczepności materiału w komorze próżniowej zastosowaniu pomiar metodą DSI (rejestrowania przyczepności poprzez badanie głębokości odcisku)”, powiedział Laurent Pambaguian z ESA. „Pomyślne testy oznaczają, że zastosowania w kosmosie mogą być kiedyś możliwe”.

„Dokonywanie zmian w sprzęcie już będącym w kosmosie jest bardzo drogie, dlatego najlepiej byłoby wpierw przetestować bardziej ogólnego robota”, dodał Henrey. „Można by go potem dostosować przy pomocy nowego oprogramowania do nowych zadań, których nie przewidziano na początku projektu.”
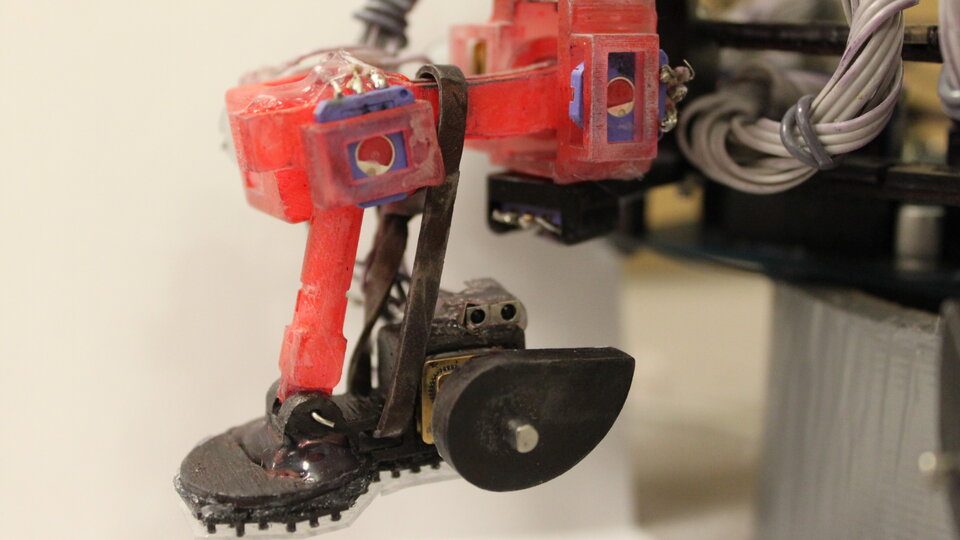
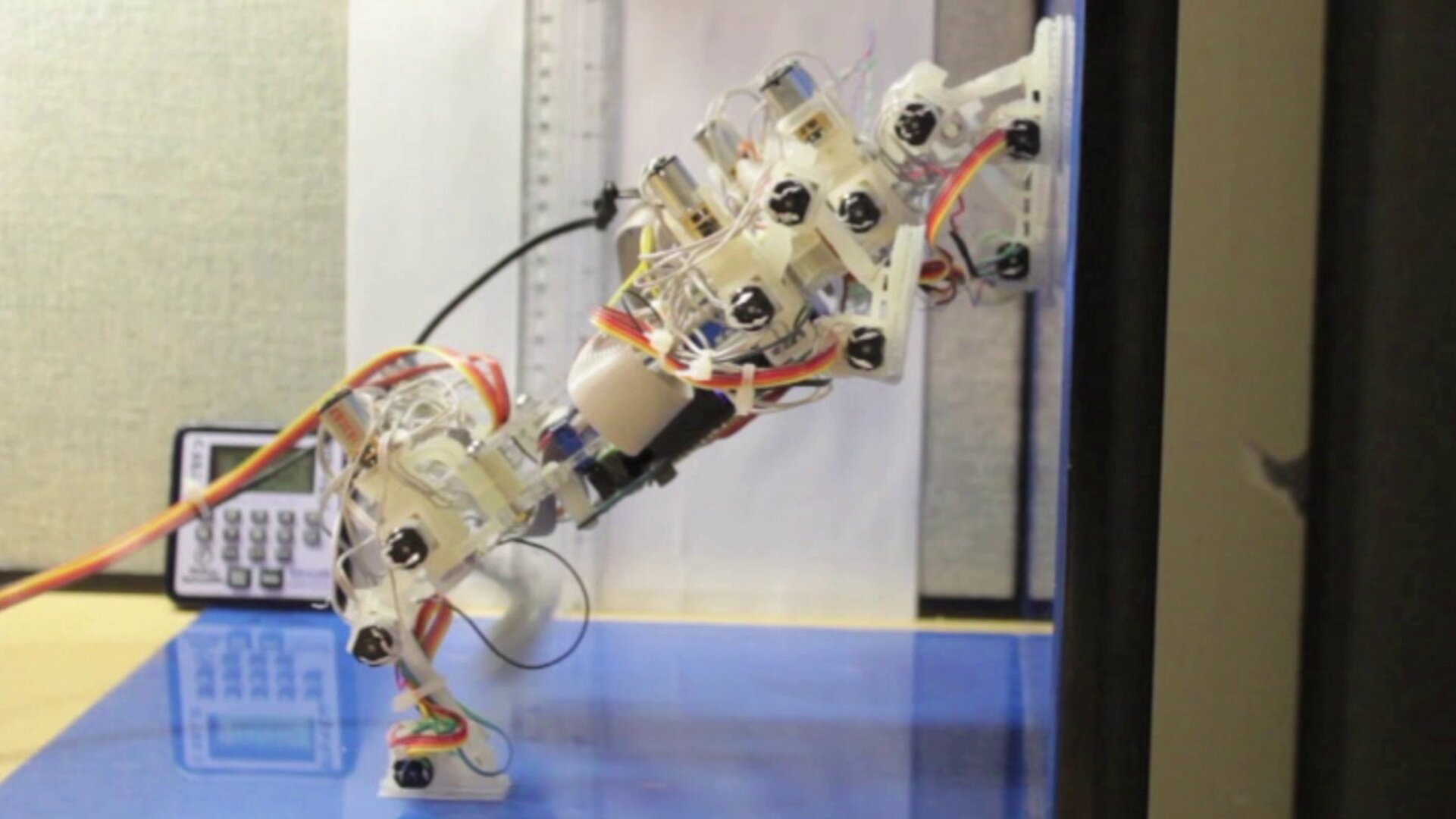
„Nasz wspinający się robot Abigaille jest zatem całkiem zręczny. Ma sześć nóg, zaś każda z nich ma cztery stopnie swobody. Tym samym może poradzić sobie w środowisku, w którym nie mógłby tego zrobić pojazd kołowy.”
„Może na przykład zmienić pozycję z pionowej na poziomą, co może być użyteczne w obejściu satelity dookoła lub ominięciu jakiejś przeszkody”.
Access the video
Mechaniczne wspinanie się po ścianach jest chwilowo ograniczone do gładkich i sztucznych powierzchni, lecz trwają badania nad rozszerzeniem tych możliwości.
Współpraca między obiema instytucjami miała miejsce w ramach Inicjatywy Partnerstwa i Networkingu ESA (ESA Networking/Partnering Initiative), wspierającej prace uniwersytetów i instytucji badawczych nad nowymi technologiami z kosmicznym zastosowaniem.


