

Primera excavación profunda completada con éxito por el ExoMars
El homólogo terráqueo del vehículo robotizado de la ESA Rosalind Franklin ha logrado perforar y extraer muestras del suelo hasta una profundidad de 1,7 m, un valor mucho mayor del alcanzado hasta la fecha por ningún otro robot sobre la superficie de Marte.
Esta exitosa recogida de material procedente de una roca dura y su posterior traslado al laboratorio instalado en el interior del vehículo marca un hito de lo más prometedor de cara a la misión ExoMars de 2022.
«Este ansiado éxito en la excavación del ExoMars en la Tierra sería también el primero en la exploración de Marte», señala David Parker, director de Exploración Humana y Robótica de la ESA. Hasta la fecha, la mayor profundidad alcanzada nunca por una excavación en el planeta rojo es de siete centímetros.


Access the video
El robot Rosalind Franklin está diseñado para perforar el terreno hasta una profundidad de dos metros, lo que le permite acceder a materia orgánica en buen estado de conservación y con una antigüedad de cuatro mil millones de años, correspondiente a una época en que las condiciones de la superficie marciana se asemejaban más a las de la joven Tierra.
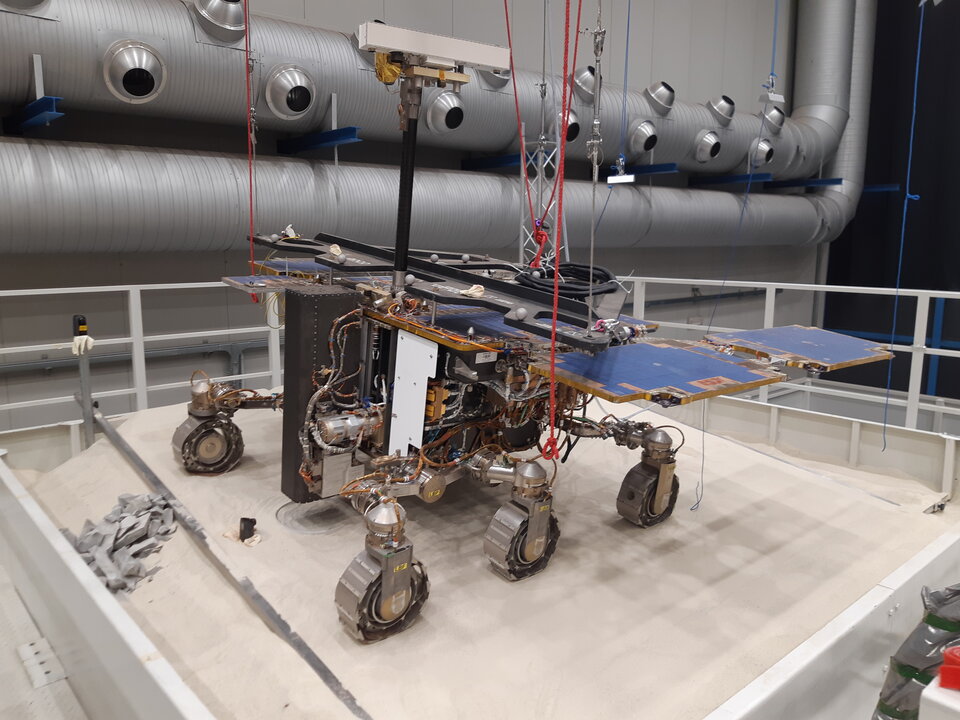
La réplica del robot, también conocida como modelo para pruebas sobre el terreno (Ground Test Model, en inglés), reproduce con fidelidad el vehículo robotizado que aterrizará en Marte. Las primeras muestras se han recogido como parte de una serie de pruebas efectuadas en el simulador de suelo marciano ubicado en las instalaciones de ALTEC, en la ciudad italiana de Turín. El desarrollo del sistema excavador ha corrido a cargo de la empresa Leonardo, al tiempo que Thales Alenia Space es el contratista principal de ExoMars 2022.
Operaciones de perforación
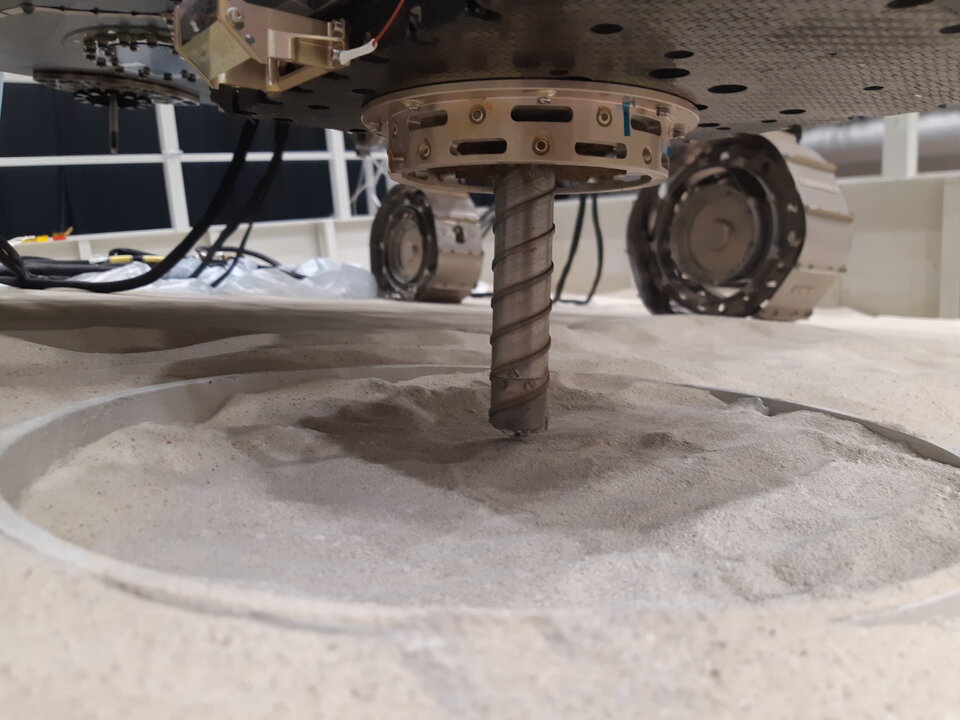
El gemelo del Rosalind Franklin ha llevado a cabo sus excavaciones en el interior de un pozo cubierto con diferentes capas de suelo y rocas. La primera muestra obtenida procedía de una veta de arcilla cementada de dureza intermedia.
La excavación tuvo lugar en una plataforma confeccionada expresamente para tal efecto e inclinada siete grados con respecto a la vertical, con el fin de simular la recogida de muestras en una posición ligeramente tumbada. La muestra extraída por el taladro presentaba una forma granular de, aproximadamente, un centímetro de diámetro y dos centímetros de longitud.
El Rosalind Franklin es capaz de retener las muestras extraídas, pues está provisto de un obturador que evita la caída de las mismas durante la extracción. Una vez recogidas, el taladro conduce las muestras hasta la superficie y las introduce en el laboratorio ubicado dentro del vehículo.
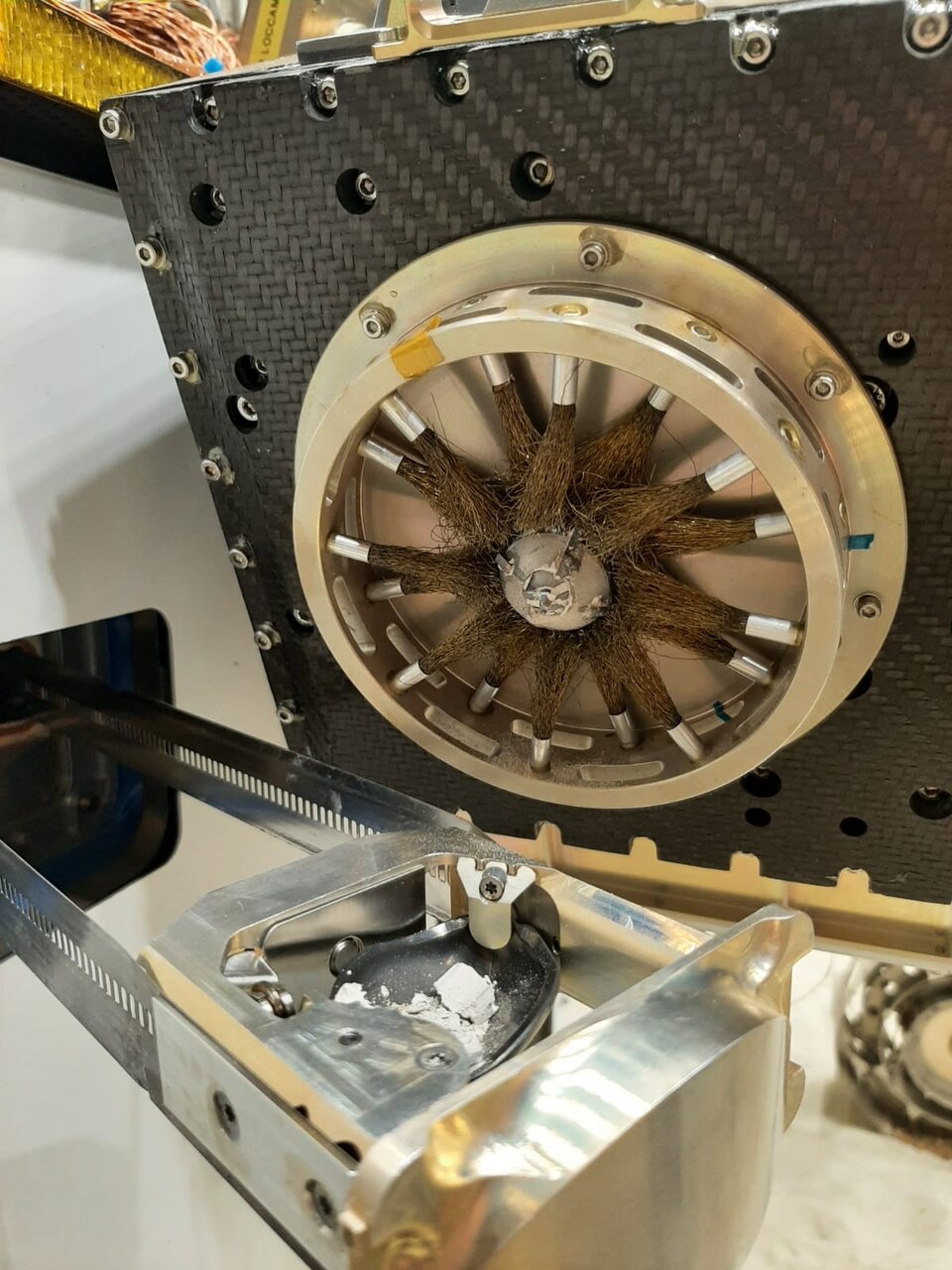
Tras completarse el repliegue del perforador, la roca se libera en el interior de una gaveta situada en la parte delantera del robot, que también se repliega y deposita la muestra en una estación de triturado. El polvo resultante de dicho triturado se distribuye, a continuación, entre los hornos y contenedores encargados de efectuar los análisis científicos del suelo marciano.
«La valiosa adquisición de muestras profundas resulta crucial para alcanzar el principal objetivo científico de ExoMars: estudiar la composición química —y los posibles signos de vida— de un suelo que no ha estado sometido a radiación ionizante destructiva», apunta Jorge Vago, científico del proyecto ExoMars.
Una excavación única en Marte
El sistema excavador de ExoMars está compuesto por un conjunto de mecanismos basados en una coreografía automatizada de herramientas y varillas de montaje. «El diseño y la construcción de la excavadora han sido tan complejos que esta primera excavación profunda representa un logro extraordinario para el equipo», confiesa Pietro Baglioni, responsable del equipo a cargo del robot ExoMars.
El funcionamiento del taladro instalado en el Rosalind Franklin se basa en la rotación. Las herramientas y varillas extensoras que lo integran se encuentran ajustadas de tal modo que pueden conformar una «sarta de perforación», lo que permite a la excavadora alcanzar una profundidad total de dos metros con ayuda de todo este instrumental.
El taladro es capaz de perforar el suelo a 60 revoluciones por minuto, una velocidad que puede variar en función de la consistencia del terreno. De este modo, la excavación de firmes sólidos compuestos por arena o por arcilla compacta puede llevarse a cabo a un ritmo comprendido entre 0,3 y 30 mm por minuto.
El sistema excavador dispone asimismo de un posicionador con dos grados de libertad, lo que permite al robot depositar las muestras en el laboratorio siguiendo el ángulo adecuado.
Una hazaña de lo más ardua
«Excavar rocas duras hasta una profundidad de dos metros desde una plataforma rodante cuya potencia es inferior a 100 vatios resulta una labor compleja», explica Andrea Merlo, ingeniero de Thales Alenia Space a cargo del funcionamiento del robot ExoMars.
Por si esto fuera poco, llevar a cabo esta labor en la Tierra resulta todavía más complicado, ya que es necesario alzar el modelo para pruebas sobre el terreno con el fin de recrear la gravedad marciana, cuyo valor es casi un tercio de la terrestre. Para ello, el modelo se cuelga del techo de un dispositivo de compensación gravitatoria diseñado de manera expresa.

Como el robot gemelo está compuesto de modelos que sobrepasan su tiempo de vida nominal, el equipo se vio obligado a ajustar algunos parámetros durante las pruebas de excavación profunda. «Esto ofreció a los ingenieros algunas pistas sobre cómo podría llegar a dañarse el sistema una vez en Marte», añade Andrea.
Pruebas de rodaje sobre Marte
El modelo para pruebas sobre el terreno ha completado con éxito un buen número de ensayos relativos al desplazamiento del vehículo y a la identificación de objetivos, mostrándose capaz de recopilar imágenes y datos en todo momento. Estas salidas en seco, destinadas a poner a prueba el manejo del robot sobre la superficie de Marte, dieron comienzo el pasado junio de 2021.

En ellas, el vehículo demostró su capacidad para seguir trayectorias precisas y para examinar su entorno tanto por encima como por debajo de la superficie con ayuda de su instrumental, que incluye cámaras, espectrómetros, un radar de sondaje subterráneo y un detector de neutrones.
Mientras tanto y de forma paralela, el auténtico robot Rosalind Franklin se prepara para su vuelo con destino Marte, previsto para dentro de un año aproximadamente (la apertura de la ventana de lanzamiento del ExoMars está prevista para el 20 de septiembre de 2022).
Nota para los editores
El programa ExoMars es un proyecto conjunto desarrollado entre la ESA y Roscosmos. En Europa, el robot es el resultado de una iniciativa común por parte de las empresas Thales Alenia Space - Italia (67 %) y Leonardo (33 %). Thales es el fabricante principal del proyecto, mientras que el sistema de excavación es obra de Leonardo. Por su parte, OHB ha suministrado los complejos mecanismos de laboratorio, y nueve equipos de instrumental de la NASA/JPL, de IKI/Roscosmos y de los Estados miembro de la ESA suministran su carga útil. Astrium Ltd. (ASU) es la empresa responsable del vehículo robotizado.
