'Slam dunk' voor Andreas Mogenson bij Interact-experiment
Een ronde pen in een eveneens rond gat steken is niet bepaald rocket science. Maar diezelfde taak vanuit de ruimte op aarde uitvoeren is heel andere koek.
Toch lukte het ESA-astronaut Andreas Mogensen maandag tijdens het eerste live-experiment van Interact. Terwijl hij op 400 kilometer hoogte rondjes om de aarde draaide, stuurde de Deense astronaut vanuit het ISS met succes een aardse robot en robotarm aan.
Tijdens het experiment maakte Andreas gebruik van een nieuw haptisch controlesysteem. Dankzij dit door ESA's telerobotica en haptica-lab ontwikkelde systeem kon Andreas in de ruimte voelen wat hij op aarde aan het doen was. Op momenten dat de flexibele arm van de Interact-robot weerstand ervoer, voelde Andreas dankzij gebruik van slimme force-feedbacktechnologie die weerstand zelf ook.
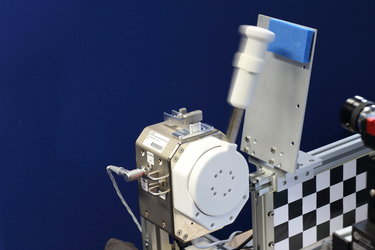
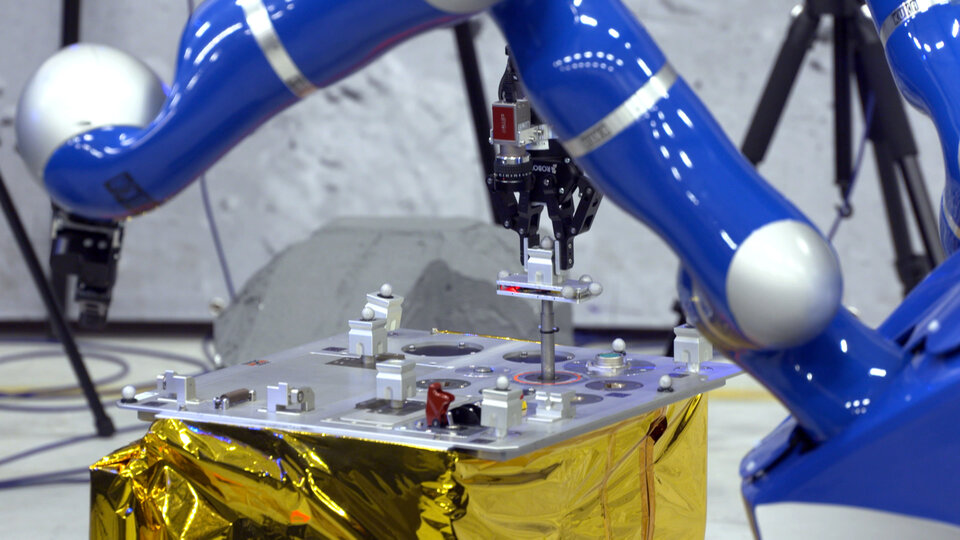
De mogelijkheid om te voelen was van essentieel belang voor het slagen van het experiment, waarbij Andreas met Interact een metalen pen in een rond gat moest prikken met niet meer dan 150 micrometer (minder dan eenzesde van een millimeter) speling. De metalen pen moest 40 millimeter in een gat gestoken worden om het experiment te laten slagen.
Steile leercurve
“We zijn heel blij met het resultaat”, aldus André Schiele van ESA's telerobotica en haptica-lab en het Robotics Institute van de TU Delft, dat meehielp bij de ontwikkeling van de techniek. “Andreas is erin geslaagd om Interact twee keer succesvol naar zijn doel te rijden en daar de pen in het gat te steken. Het is de eerste keer dat zo'n precieze operatie vanuit de ruimte is uitgevoerd.”
Toen het experiment maandag van start ging, had Andreas nog niet eerder met de Interact-robot gereden - ook niet toen hij zelf nog op aarde was. Maar de besturing bleek volgens Schiele snel op te pikken. “Bij zijn eerste rit deed Andreas er 45 minuten over om zijn doelwit te bereiken en de pen in te pluggen. Bij de tweede rit was hij binnen 10 minuten klaar, wat een steile leercurve laat zien.”
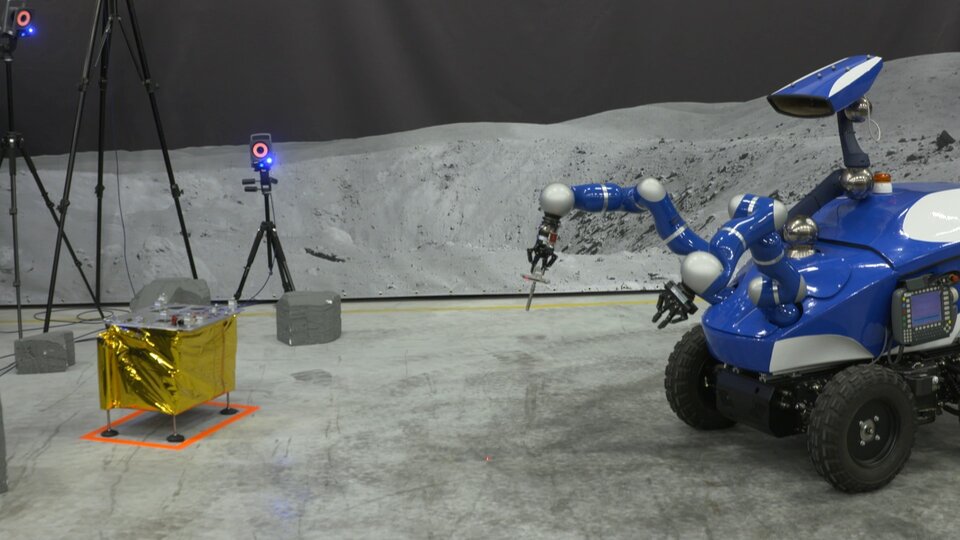
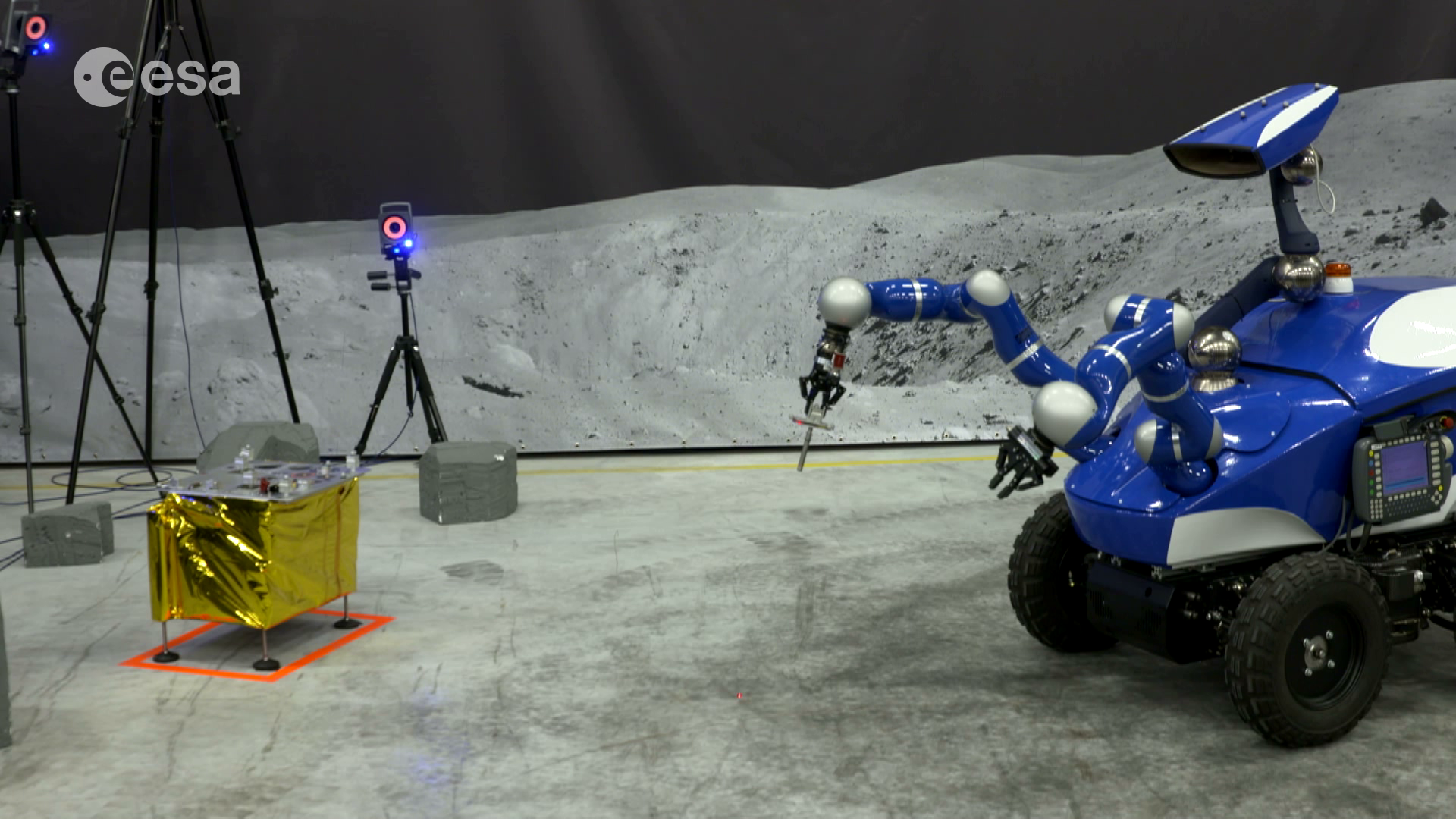
Het Interact-experiment vond plaats bij ESA's testcentrum ESTEC in Noordwijk en werd ter plekke gevolgd door een breed scala aan media en een grote groep enthousiast ESTEC-personeel. De Interact Centaur – de robot die bij het experiment gebruikt werd – werd ontwikkeld en gebouwd door ESTEC, in samenwerking met studenten van de Technische Universiteit Delft.
144.000 kilometer
De van vierwielaandrijving voorziene Interact Centaur is niet zomaar een robot. Het voertuig bestaat uit een camera, een keur aan afstands- en localisatie-sensoren en een aantal zeer geavanceerde robotarmen, die de bestuurder ervan door middel van force-feedback vertellen wat ze voelen. Het communiceren van die informatie werd extra moeilijk door de tijdsvertraging die optreedt. Die tijdsvertraging ontstaat door de afstand tussen de Interact-robot op de grond en het internationale ruimtestation ISS, dat met een snelheid van 8 kilometer per seconde om de aarde heen valt.
De signalen van de Interact reisden vanaf het ISS naar satellieten in een geostationaire baan en schoten van daaruit naar een grondstation in de Amerikaanse staat New Mexico. Van daaruit reisde de signalen naar NASA in Houston. Via een transatlantische kabel kwamen de signalen uit bij ESTEC. Signalen die vanaf de Interact op aarde naar het ISS reisden, legden de route in omgekeerde volgorde af. Het retourtje bedroeg een afstand van meer dan 144.000 kilometer.
Door de afstand die de signalen moesten afleggen werkte Andreas tijdens het experiment met een tijdsvertraging van ongeveer 1 seconde. Dankzij een slimme controlemethode van het telerobotica en haptica-lab van ESA kon deze tijdsvertraging deels gecompenseerd worden. Dankzij die compensatie verliep het besturen van de robotarm een stuk soepeler.

Na het oorspronkelijke experiment gebruikte Andreas de hem nog resterende tijd om aanvullende haptische tests uit te voeren. Zo gebruikte hij een van force-feedback voorziene joystick om het onderscheid in stijfheid van verschillende springveren te bepalen. Deze test moet toekomstige Interact-gebruikers inzicht geven in de gevoeligheid van de besturing.
Hulp op aarde
Op afstand bestuurbare ruimterobots kunnen erg nuttig zijn in gevaarlijke of anderzijds onbereikbare omgevingen. Dat geldt niet alleen voor dergelijke plekken in de ruimte, maar ook voor plekken op aarde. Deze robots kunnen bijvoorbeeld taken uitvoeren in ijskoude poolgebieden, diep in de zee of op nucleaire rampplekken.
Het Interact-experiment is een eerste stap in de richting van de ontwikkeling van robots die hun bestuurders voorzien van sensor-input tijdens de aansturing. Dergelijke systemen kunnen in de toekomst bijvoorbeeld gebruikt worden om robots in een baan om de aarde aan te sturen vanaf de grond. Dergelijke robots kunnen bijvoorbeeld ruimte-afval opruimen of helpen bij de aanleg van een maanbasis. In de toekomst kunnen astronauten dergelijke robots mogelijk aansturen op het oppervlak van Mars, terwijl ze zelf veilig in een baan om de rode planeet blijven.
Het Interact-experiment is een onderdeel van een reeks aan experimenten die Andreas zal uitvoeren tijdens zijn iriss-missie. De Deense astronaut bevindt zich sinds vrijdag 4 september aan boord van het internationale ruimtestation. Daar blijft hij tot zaterdag 12 september.

Access the video