

Na kosmickou stanici zamíří citlivý joystick
Na nejbližší zásobovací lodi ESA k Mezinárodní kosmické stanici bude umístěný jeden z nejpokročilejších kdy vyrobených joysticků. Jeho úkolem bude dálkově ovládat roboty na Zemi, a to přímo z oběžné dráhy.
Družice ATV (Automated Transfer Vehicle), která se připravuje na start v průběhu letošního léta, dopraví na orbitální stanici více než pět tun pohonných látek, zásob a vědeckého vybavení. V tomto nákladu bude i první testovací zařízení pro ověření toho, jak kosmonauti vnímají dotykové podněty ve stavu beztíže.
Experiment bude provedený s pomocí zdánlivě jednoduchých ovladačů, které ze všeho nejvíce připomínají klasické joysticky pro počítačové hry. S nimi budou kosmonauti hrát skutečné hry, např. Pong.
Výkony dosažené v těchto hrách budou společně s vyplněnými dotazníky analyzovány. Výzkumníci tak získají představu o lidské motorice během dlouhodobého pobytu ve stavu beztíže stejně jako o tom, jak člověk reaguje na různé podněty.
Uvnitř zařízení se pak skrývá komplex servomotorů, které jsou schopné eliminovat jakoukoliv sílu vyvinutou kosmonautem – a naopak jsou schopné vytvářet odpor, který bude kosmonaut cítit. Je to podobné jako v běžné videohře, kde hráč narazí na překážku.
Rozdíl na oběžné dráze je – řečeno slovy Isaaca Newtona – v tom, že „každá akce má rovnocennou a opačnou reakci“. Takže aby se tlak kosmonauta na joystick neproměnil v nekontrolované pohyby v beztíži, může být zařízení připevněno buď do speciálních úchytů na tělo operátora, nebo na standardizované úchyty na kosmické stanici.
„Vytvoření hardware, který bude extrémně přesný, ale zároveň extrémně citlivý představovalo hlavní výzvu projektu,“ vysvětluje vedoucí laboratoře telerobotiky v ESA André Schiele, který na vývoj dohlížel.
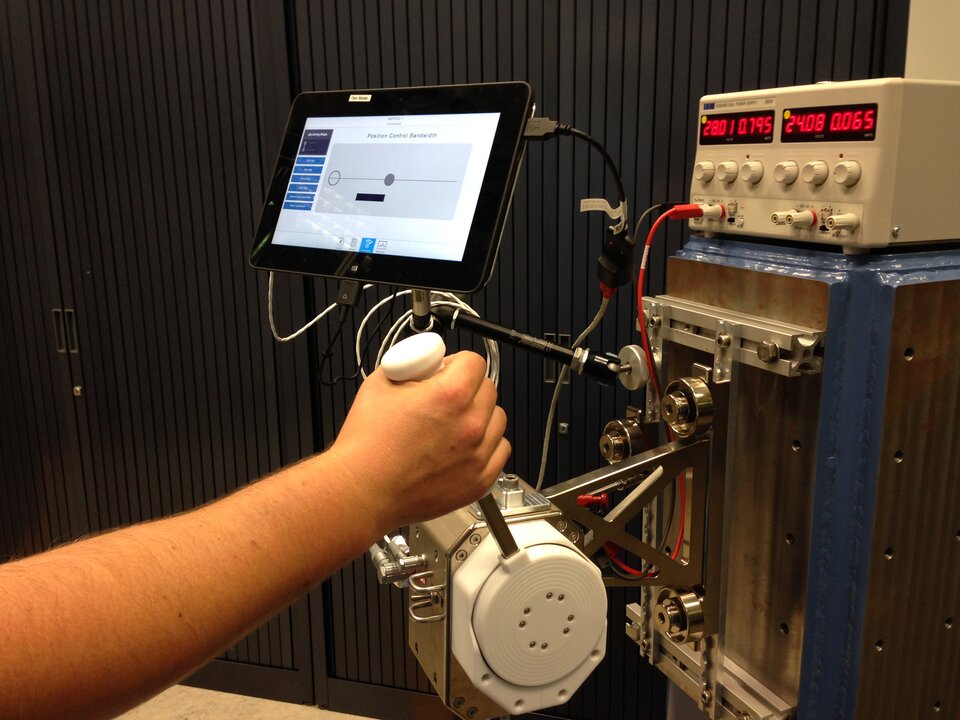
Zatím je naplánováno sedm různých testů, přičemž další jsou připraveny: nové je totiž možné nastavit velmi rychle. Pro instalaci software a provádění experimentů bude využívaný dotykový tablet.
Budoucí planetární mise počítají s roboty pracujícími na povrchu cizích světů, které budou obsluhovat kosmonauti z drah nad nimi. Tedy dostatečně blízko na to, aby prováděli obsluhu v reálném čase bez výrazné komunikační prodlevy, ale zároveň bude nutnosti nákladného a nebezpečného výsadku na povrchu tělesa.
Ale přesné řízení robotů vyžaduje správnou odezvu na to, co robot „cítí“. Jde tedy nejen o vizuální kontrolu, ale také o schopnost vnímat fyzický kontakt na dálku.
Přitom je extrémně důležité použít správnou sílu potřebnou pro nejkomplexnější úkoly jako je odběr vzorků hornin nebo instalace zařízení: většina z nás je schopná zavázat si tkaničky u bot potmě, ale ne za chladné zimní noci s totálně promrzlými prsty.

Díky spolehlivé zpětné vazbě bude moci kosmonaut automaticky upravovat sílu, kterou následně jím řízený robot vyvine při jemné a pečlivé práci.
Experiment, který připravilo technické středisko ESA ESTEC v Noordwijku, bude prvním vyslaným do vesmíru v rámci meziagenturní iniciativy Meteron (Multi-Purpose End-to-End Robotic Operation Network). Jejím cílem je studovat otázky telerobotiky ve vesmíru.
Meteron je realizovaný ve spolupráci s několika středisky NASA, německou letecko-kosmickou agenturou DLR a ruskými partnery jako je Roskosmos, Institut robotiky a technické kybernetiky v Petrohradu a společností Eněrgija.
