

Technical challenges push the launch of the ATV to 2007
Today, about 98 percent of the hardware for Jules Verne, Europe’s first Automated Transfer Vehicle (ATV) spaceship, considered to be the most complex space vehicle ever developed in Europe, is already assembled and almost ready to fly.
"Obviously we cannot launch unless we have everything 100 percent ready and fully tested", said John Ellwood, ESA’s ATV Project Manager. "The extensive three-year test campaign on such a complicated programme -- with its unavoidable problems and delays -- will push us back by almost one year, to 2007."
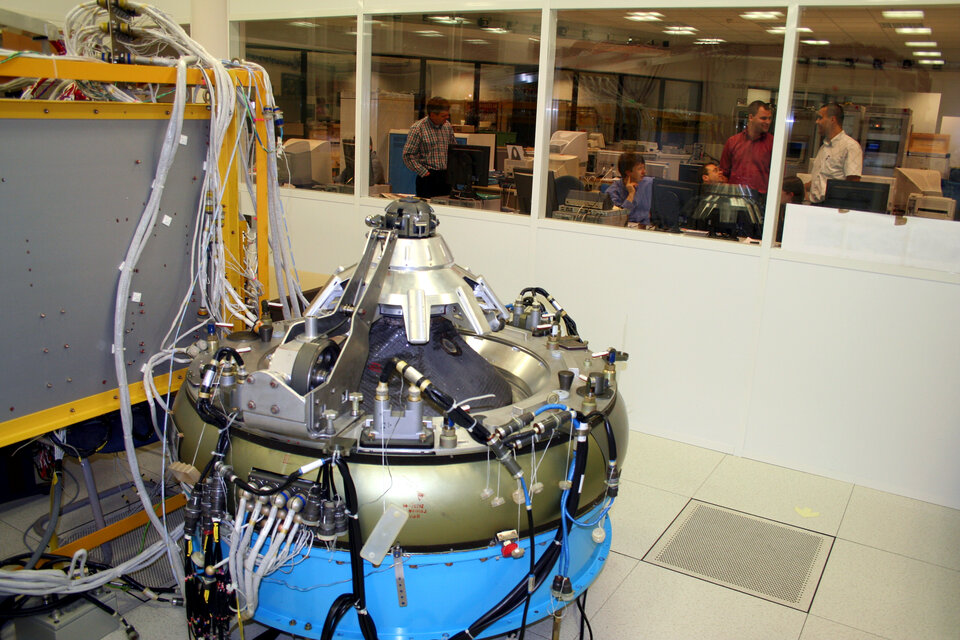
Since summer 2004, the Jules Verne spaceship has been progressively tested and assembled at ESA's research and technology centre, ESTEC, in Noordwijk, the Netherlands. Hundreds of integration operations, hardware checks and functional tests of the 19.7-tonne vessel have been achieved successfully, at times requiring new technical solutions, minor changes and a lot of fine-tuning.
The technical complexity of this ESA programme, which also involves close cooperation with NASA, the Russian Federal Space Agency Roscosmos and several Russian aerospace companies, had already caused a two-year delay of the inaugural launch, to 2006. But some hardware failures occurred earlier this year and have impacted the campaign schedule with a snowball effect, now delaying the launch to 2007.

A small structural failure, observed in April on one valve during auxiliary testing, could have far-reaching consequences. The fatigue failure of a three-millimetre rod inside the valve will force ATV engineers to remove, modify and replace all 48 valve-actuators in Jules Verne’s fuel pipeworks of the propulsion system. Since the defective parts are deeply buried in the almost-completed ATV, the time-consuming operation, with secondary effects on other work, will delay the whole ATV schedule by at least five months.
On a separate matter, some recurring anomalies on the drive mechanism of the crucial solar arrays have forced engineers to add a back-up device to monitor the good angular position measurement of the vital system. Some 95 minutes after lift-off, the ATV activates its navigation systems and deploys its nine-metre long solar panels, which must track the Sun to get energy in orbit despite an orbital speed of 28 000 km/h.
"The bad luck is that these two failures occurred on some critical hardware late in our test campaign", says John Ellwood. "We now need to have them fully refurbished and put back in flight configuration before the start of the environment testing, such as the main acoustic tests now set for February next year. The discovery of the problems can also be viewed in a positive light since we are able to fix them now. If they had been discovered later, they could have been mission- threatening at launch."
The ATV schedule was also slowed down by a variety of other issues which are adding up. For example, new requirements and specifications, introduced by international partners such as NASA and Roscosmos, have impacted the ATV flight software, which consists of over one million lines of code. The ATV will dock with the Russian Zvezda module, a part of the ISS; NASA has the overall responsibility of the safety aspects of the Station.
“Of course, when something changes on board the ISS, we do not have any other choice than to adapt. For example, when the Russians inform us that, in a couple of months, the GPS receivers on the Station – that Jules Verne will be using for rendezvous navigation -- have been changed or when NASA tells us that the ATV has now to be able to undock regardless of the attitude of the Station, we have to make new calculations and new tests each time to be sure that we are compatible; sometimes these changes are for the better, but they come late in our schedule and they still take time”, said Nicolas Chamussy, EADS-ST ATV Programme Manager.
Unique complexity
However for the hundreds of engineers and technicians who are working in Europe on Jules Verne, these difficulties are not unusual. Due to the complexity of the automated mission, the ATV software is considered to be the most elaborate ever developed in Europe. It is ten times the size of Ariane-5 software. This multi-functional spaceship, which will navigate on its own towards the ISS, combines both the fully automatic capabilities and autonomy of an unmanned vehicle, and the strict human spacecraft safety requirements.
Any spacecraft launched in the history of astronautics has always required extensive testing and this vital process has always revealed anomalies and failures to be corrected. Because of its unique complexity, the testing and the small corrections which have been performed on the ATV, have more impact on the campaign schedule.
"Now the mission concept for Jules Verne is finally frozen, which makes our challenging task much easier", says Patrice Amadieu, ESA’s ATV Deputy Project Manager.
Full flight simulations expected in 2006

The next challenge for the Jules Verne campaign is to test in 2006 the full interaction between the very extensive flight software and the hardware as a whole. They have both already been tested at the subsystem level at the different manufacture plants and on EADS-Space Transportation premises in Bremen, where the ATV was initially integrated in 2003. To simulate all phases of the mission, engineers at EADS-ST facilities in Les Mureaux, 50 km west of Paris, are using an ATV simulation facility, the Functional Simulation Facility (FSF). The simulation facility includes some of the actual mechanisms and flight boxes, which are the electronic 'brain' and the 'nervous system' of the ATV, and an even larger piece of ground equipment, which simulates all the external interfaces and which includes up to 60 electronics racks.
Through hundreds of cables and umbilicals, dozens of ground computers, controlled by some 50 engineers, the simulation facility is able to replicate the functional environment of the navigation and flight dynamics during all possible nominal and off-nominal scenarios of the spaceship. Using key elements of the real flight hardware, such as the GPS or the rendezvous sensor - which enables laser-guided rendezvous operations in orbit - the full simulations are expected for next year with the latest generation of ATV Flight Application Software (FAS). To get this very complicated simulation facility working has taken longer than expected.
"To develop the incremental software versions is an on-going technical challenge, which presented some problems over the last years. We have made a lot of progress and the software is now stable. So we are confident that we – along with EADS -- are going to meet the new date", says John Ellwood.

Unlike other space programmes, such as satellites or even planetary probes, the ATV software has very limited time to be upgraded and patched after launch. Europe’s first ever automated space rendezvous by Jules Verne will occur between 10 and 13 days after launch. The first mission is made more complex as the failure cases must also be tested. This first flight must test and prove that the double-decker bus-sized ATV can handle any type of contingency scenario, such as interrupting the rendezvous - at any time - and flying away from the 183-tonne ISS.
"Whenever, you are pushing the technical barriers, you are bound to meet some obstacles along the way", underlines Ellwood. "Therefore, the problems we are encountering with Jules Verne are not exceptional, except that this programme is more complex than anything else we have tried to do in Europe. However we are also making great progress in most areas of this fascinating endeavour."
According to the present schedule the first ATV will be ready to launch in March 2007, but the actual mission will most likely take place in May 2007. All the international partners have to agree upon the best date to re-supply the Station with the 7.1 tonnes of cargo carried up by the ATV.
“With the new schedule set for a launch in 2007, we feel much more comfortable and confident, but with the quantity of tests we still have to perform, we also hope that the hardware and software will be nice to us!”, says Chamussy.


