
ESA-Astronaut testet europäischen Roboterarm unter Wasser
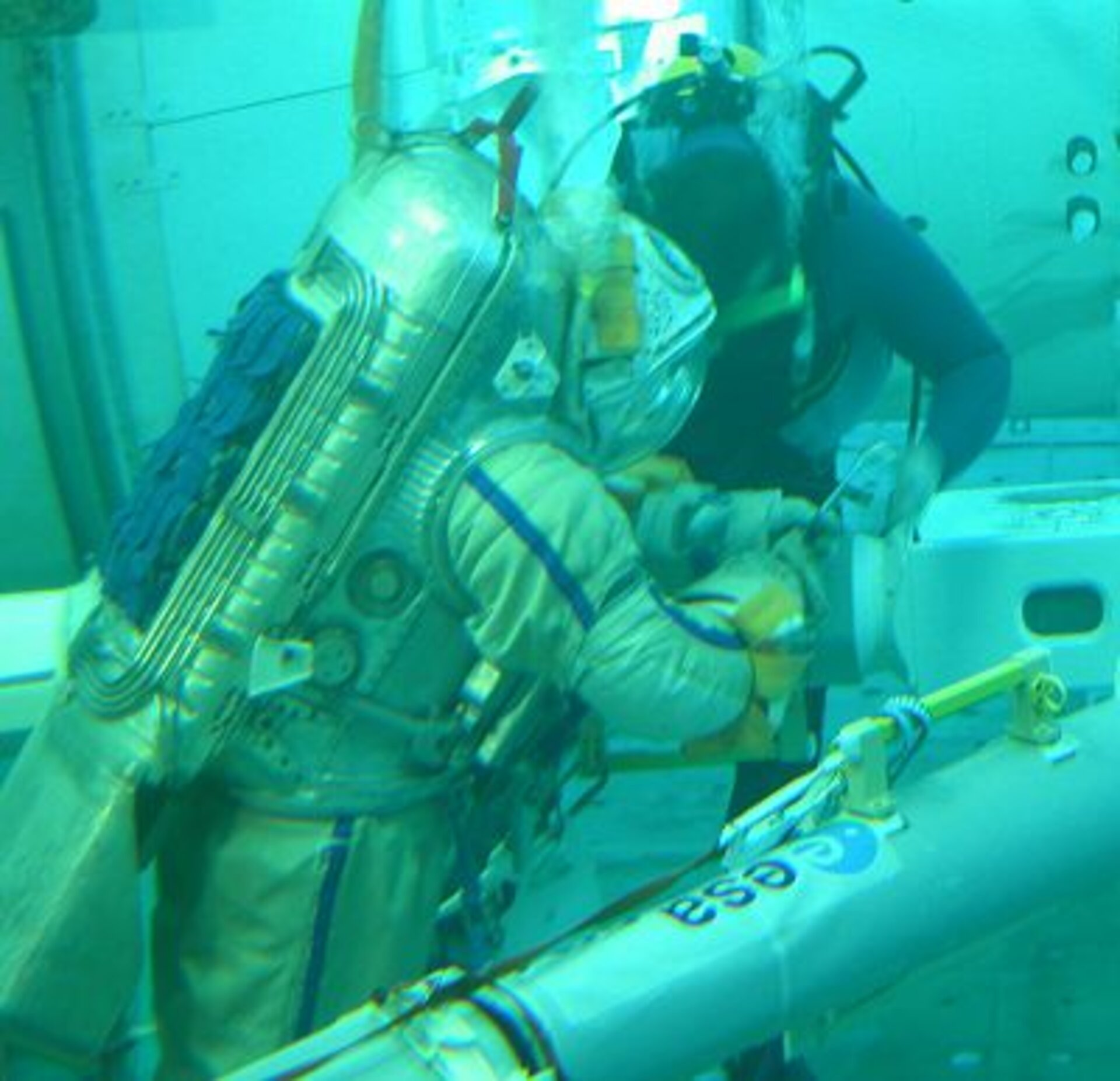
In umfassenden Tests wurde letzte Woche der europäische Roboterarm „ERA“ im Gagarin-Kosmonautentrainingscenter bei Moskau auf seine Weltraumtauglichkeit überprüft. Dafür schlüpfte ESA-Astronaut André Kuipers in einen russischen Orlan-Raumanzug und verbrachte über drei Stunden im Wasser. Denn die Bedingungen unter Wasser ähneln der Schwerelosigkeit im All – so konnte der Roboterarm analog seiner späteren Umgebung getestet werden.
Beeindruckende Ausmaße
Der elektronische Arm misst über elf Meter und wiegt 630 kg. Und obwohl die Technik des von Kuipers getesteten WET-Modells (Weightless Environmental Test) aus dem Jahr 1998 stammt, ist sie in einwandfreiem Zustand. Der Roboterarm soll auf der internationalen Raumstation ISS installiert und am russischen Mehrzweck-Labormodul MLM eingesetzt werden. Mit sieben Gelenken, einer Reihe Werkzeuge und ausgereifter Elektronik ist „ERA“ beweglich und für verschiedenste Außenarbeiten im russischen Bereich der ISS geeignet.

Philippe Schoonejans, verantwortlicher ESA-Manager für das Projekt, erklärt: „ERA ist kompatibel mit der russischen Luftschleuse. Daher sind Astronauten nicht mehr darauf angewiesen, die Raumstation für Außenarbeiten zu verlassen. Mit Hilfe von Videokameras ist es ERA möglich, die Außenwand der Station zu inspizieren und Hilfsmittel sowie Experimente zu transportieren. Zudem kann der Roboterarm als Kran für Astronauten genutzt werden.“
Das letzte Woche getestete Modell wurde 1998 von einem niederländischen Konsortium unter der Leitung von Dutch Space entwickelt. Der ursprünglich für 2001 geplante Einsatz von ERA mit dem Space Shuttle wurde verzögert. Der Roboterarm wird nun im November 2007 zusammen mit dem MLM an Bord einer russischen Proton-Rakete ins All geschickt.
Ein schwieriges Unterfangen…

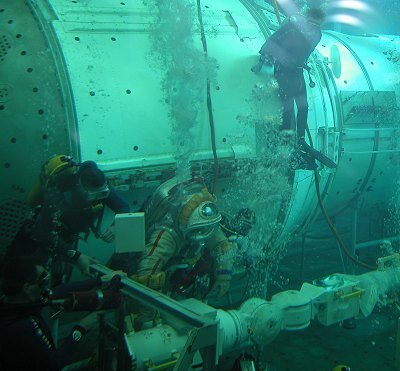
Bis dahin ist noch eine Menge zu tun. Letzte Woche musste das WET-Modell bei einem von Kuipers’ Unterwassertests zerlegt und neu zusammen gefügt werden. Kuipers überprüfte zusammen mit seinem russischen Kollegen Dimitry Verba die manuelle Bedienung, welche bei einem eventuellen Ausfall der Automatik zum Einsatz kommt. „Die Übung war schwierig und wir brauchten viel Geduld“, sagte der niederländische Astronaut. „Wir mussten eine ganze Reihe manueller Rotationsbewegungen durchführen, was unter Wasser keine leichte Aufgabe ist.“
Der Roboterarm funktioniert gut. Schoonejans ist jedoch bewusst, dass noch einige Verbesserungen vorgenommen werden müssen. Einige der einhändigen Bewegungen konnte Kuipers nur mit seiner zweiten Hand oder mit Verbas Hilfe durchführen, da der Astronaut keine Möglichkeit nutzen konnte, sich zu stabilisieren. Ein mobiler Befestigungsmechanismus wäre eine denkbare Lösung. Zudem muss ein Schlüsselsatz modifiziert werden, da er beim Anziehen von Schrauben ständig abrutschte, was wertvolle Zeit kostet. Teile des Isoliermaterials verdeckten zuweilen die Videokameras, sodass auch hier nachgebessert werden muss.
…bis hin zur Perfektion
Für das kommende Jahr haben sich das russische Unternehmen Energia und die europäischen Hersteller von ERA vorgenommen, den Roboterarm zu perfektionieren. Ab Mitte 2006 sollten alle Funktionen angepasst sein, so dass die zukünftige ISS-Mannschaft erstmalig mit ERA trainieren und sich für den offiziellen Start 2007 wappnen kann.

