
Astronauta da ESA vai para debaixo de água para testar o Braço Robótico Europeu
O modelo WET do Braço Robótico Europeu (ERA) foi cuidadosamente inspeccionado e testado no Centro de Formação de Cosmonautas Gagarin, perto de Moscovo, na semana passada.
Impressionante
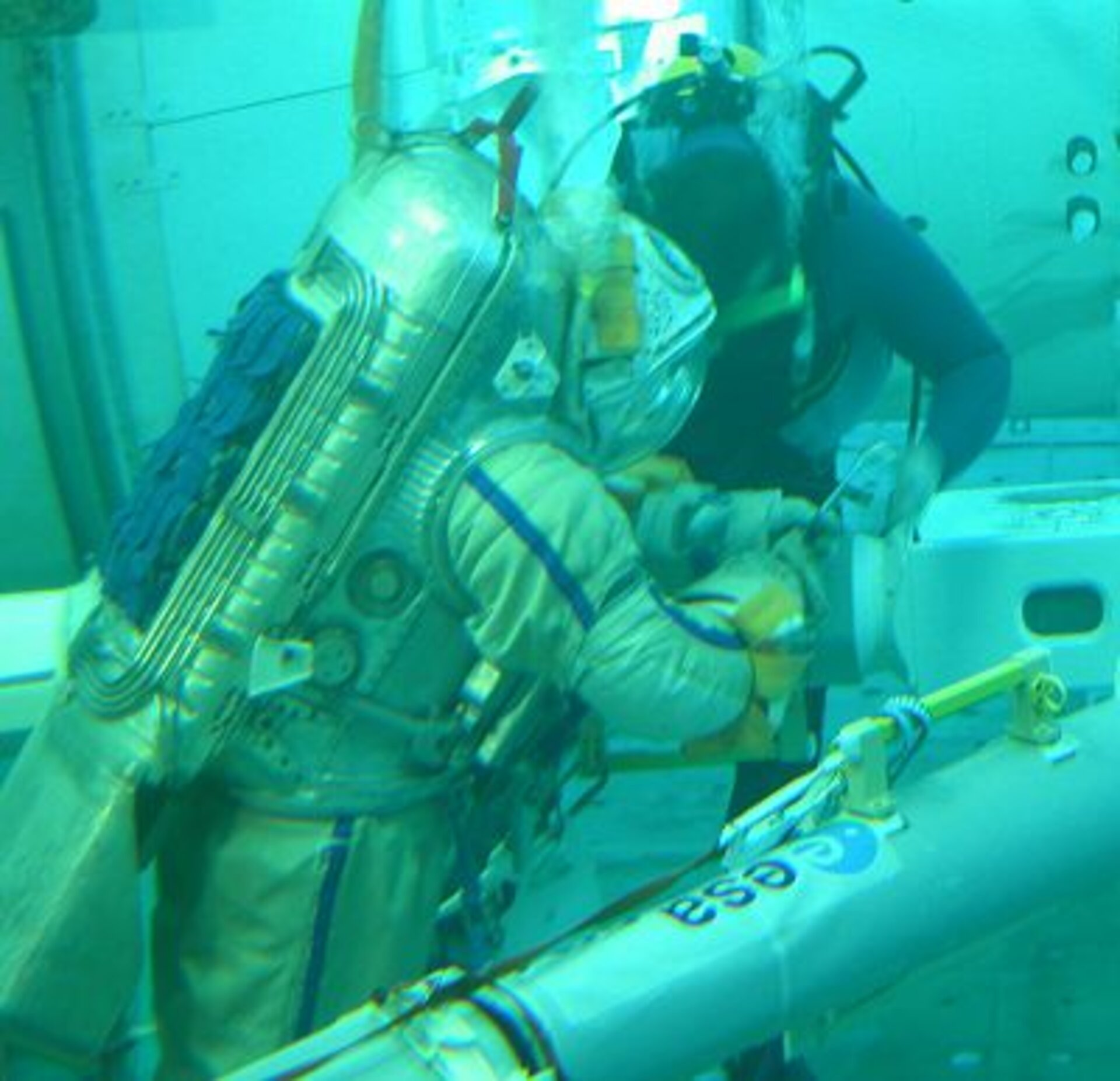
Durante os testes o astronauta da ESA André Kuipers usou um fato espacial russo Orlan. Ele passou mais de três horas debaixo de água com o modelo do braço robótico, que foi construído em 1998, mas que ainda está em perfeitas condições.
O impressionante braço robótico tem mais de onze metros de comprimento e pesa 630 kg. Quando o ERA chegar à Estação Espacial Internacional (ISS), o Módulo Laboratorial Multiusos (MLM) russo será a sua base. Com a ajuda de sete articulações, várias ferramentas e respectivos componentes electrónicos, este auxiliar dos astronautas pode deslocar-se como um insecto em torno dos segmentos da ISS russa e será utilizado em diversas tarefas.

O director do projecto ERA da ESA, Philippe Schoonejans, afirma: "O ERA pode trabalhar com a bolsa de ar russa, o que significa que os astronautas já não precisarão de se aventurar fora da Estação Espacial para instalar algumas peças de hardware. Utilizando câmaras de vídeo, o braço pode efectuar inspecções ao exterior da Estação, movimentar experiências e abastecimentos e até servir de guindaste para os astronautas."
Kuipers experimentou o modelo de Teste Ambiental Sem Peso do ERA, conhecido como 'modelo WET'. Este modelo foi construído em 1998 por um consórcio de empresas lideradas pela empresa holandesa Dutch Space. Inicialmente, o ERA estava previsto ser lançado no Space Shuttle em 2001 mas, dadas as circunstâncias, o seu lançamento teve de ser adiado. No Verão passado, decidiu-se que o braço robótico seria lançado em Novembro de 2007, a bordo de um foguetão russo Proton, juntamente com o MLM.
Percurso difícil

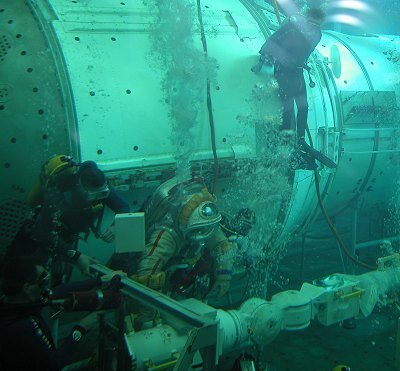
No entanto, até lá há ainda muito trabalho a fazer. Na semana passada, num exercício subaquático levado a cabo por Kuipers, o modelo WET foi desmontado e novamente montado. Juntamente com o russo Dmitry Verba, Kuipers verificou também os comandos manuais que servem de backup ao sistema automatizado. "Enfrentámos várias dificuldades durante o exercício. Foi necessária muita paciência," segundo o astronauta holandês. "Tivemos que efectuar muitos movimentos de rotação durante o controlo manual do braço. E debaixo de água esta não é uma tarefa fácil."
O braço funcionou bem. Apesar disso, Schoonejans concluiu que é necessário efectuar alguns aperfeiçoamentos. Algumas operações de uma só mão tiveram de ser realizadas por Kuipers com as duas mãos, ou com a ajuda de Verba, uma vez que o astronauta não tinha condições para se manter estável. Uma solução possível seria a utilização de um mecanismo de fixação móvel. É ainda necessário modificar um conjunto de chaves de fenda, já que estas se soltavam constantemente durante o aperto dos parafusos, deperdiçando tempo precioso. O material de isolamento, que por vezes obstruía as câmaras de vídeo, terá também de ser fixo de forma mais eficaz.
Perfeição
No próximo ano, a empresa russa Energia, bem como os parceiros europeus que construíram o ERA, irão trabalhar com vista ao aperfeiçoamento do braço robótico. A partir de meados de 2006, assim que os novos procedimentos estiverem concluídos, as futuras tripulações da ISS irão efectuar treinos com o ERA pela primeira vez. Os astronautas ficarão assim completamente familiarizados com o ERA antes do seu lançamento em 2007.

