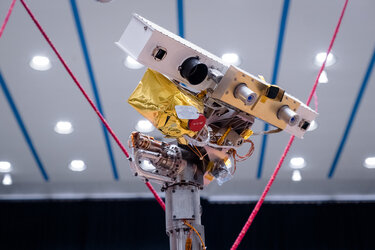
SAFER rover fitted with science instruments
The Bridget rover used for the SAFER field trial in Chile's Atacama Desert being fitted with its trio of scientific instruments on the morning of 8 October 2013. These sensors operate in combination for navigation, sample acquisition and analysis:
• The Panoramic Camera (PanCam) provides stereo 3D terrain imagery to help locate the rover’s position in terms of local geography, provide a geological context of sites being explored, and help select the best sites to carry out detailed analysis, as well as imaging drill samples before the rover ingests them. It can also be used to study atmospheric properties and capture high-resolution images of difficult-to-access locations such as craters of rock walls. A PanCam emulator called AUPE-2 is being used for SAFER, developed by Aberystwyh University, with its 3D vision processing overseen by Joanneum Research from Austria.
• The Close-Up Imager (CLUPI), developed by the Space Exploration Institute in Switzerland, is a robotic substitute for one of a geologist’s most useful instruments: a hand lens. High-resolution imaging of rock surfaces, soil and wind drift deposits is crucial for understanding the geological context of the site being explored. CLUPO can characterise rock outcrops as well as studying drilled samples.
• The WISDOM ground-penetrating radar, the work of the LATMOS research lab of the Centre National de la Recheche Scientifique in France peers through rock and soil to provide a detailed view of the shallow subsurface just beneath the rover, giving a 3D context to the site being explored, measuring its physical properties and hunting for well-compacted sedimentary deposits that might be associated with a past water-rich environment.